This is the final item on the Goldilocks Analogue as a design and production exercise.
Thank you for pledging on the Kickstarter Project page. Closed on November 19th 2015, with 124% funding. Now that the Kickstarter Pledges have been shipped, the Goldilocks Analogue is available on Tindie.
I’ve been updating this post with the pre-production and production experience over the past few months.
Also additional optional libraries to provide support for each of the advanced features of the Goldilocks Analogue are available in the Arduino IDE Library Manager.
DAC Library (including IIR Filtering), using Timer 3.
Arduino IDE compatibility testing revealed only a few remaining issues related to support of the ATmega1284p used in the Goldilocks Analogue. Two issues have been raised and resolved as 2 pull requests on the main Arduino IDE development path.
In the SD Card Library, the hardware SPI interface was linked to a limited set pin assignments contained within the library, rather than referring to the relevant pins_arduino.h or the variant.h file suiting the board selection. So the SPI pins defined in the Sd2Card.h header file are assigned from pins_arduino.h rather than those arrived at in the SD2PinMap.h method for Software SPI.
Both these issues have been committed into the Arduino main git tree, and they have landed in Arduino IDE Release 1.6.8.
The only remaining known issue is the limitation in the configuration of the Tones() code to use only Timer 2. We would like to use Timer 2 for the RTC. There is no other option but to use this Timer for the RTC support, so it would be good if Tones() could be configured to use a different timer.
Testing
Rather than going back over old ground, I’ll just be testing the pre-production version against the Version Prototype 4, to ensure that the things that should have improved, are improved, and that nothing has become broken.
Power Supplies
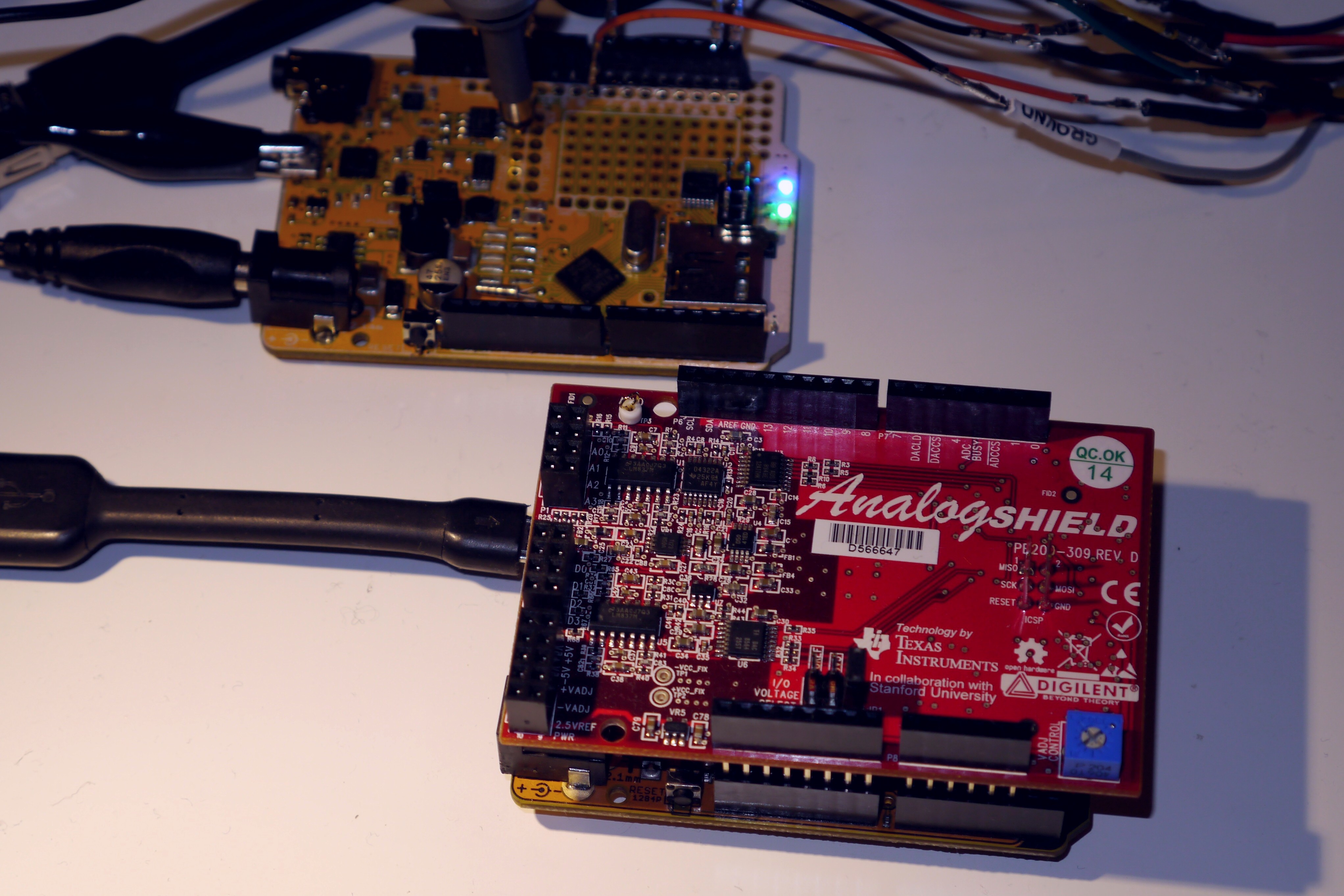
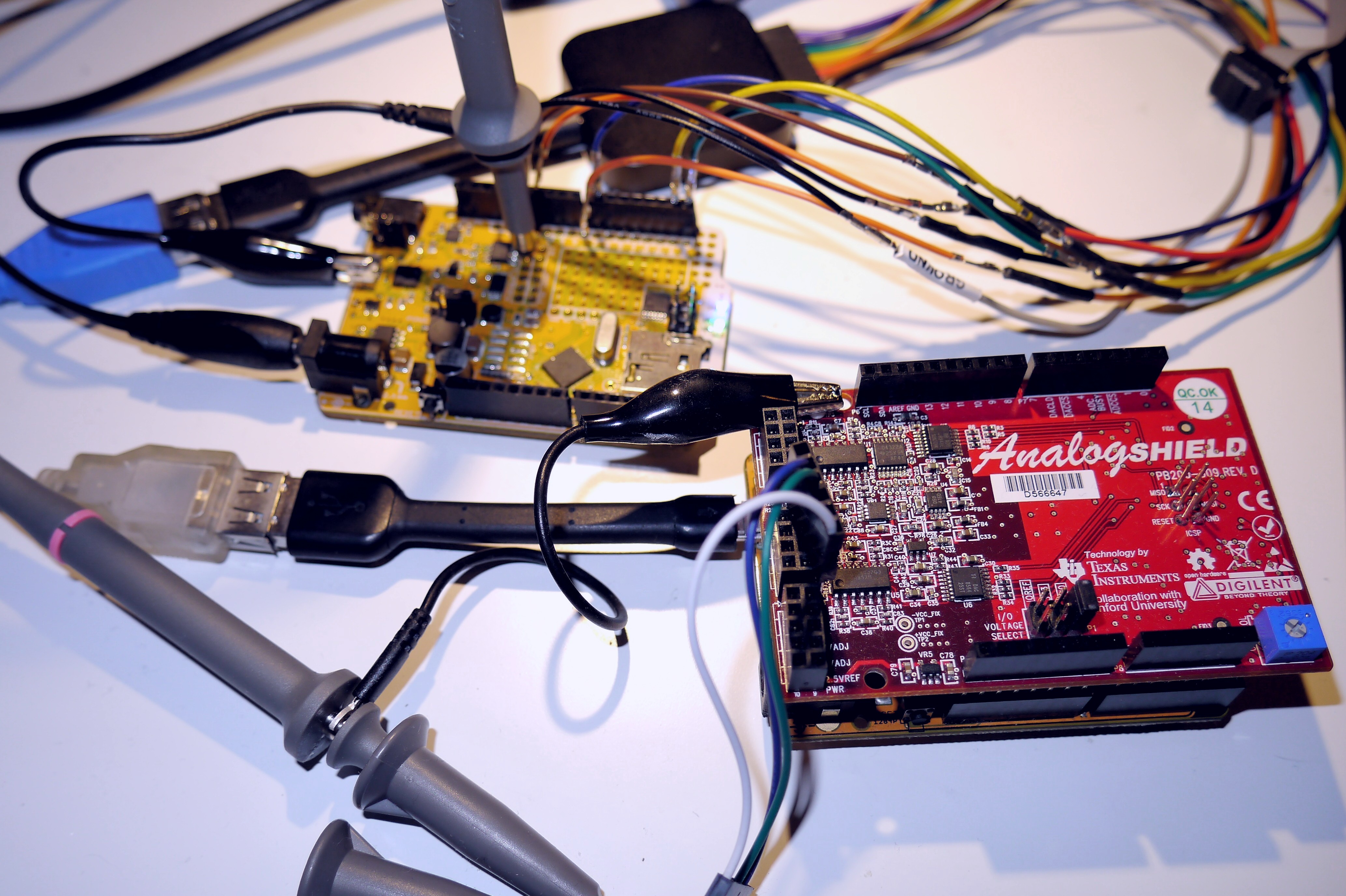
In the image below, Channel 1 (yellow) is 4.47mV of noise present at the output capacitor for the power supply, and Channel 2 (blue) is the 3.47mV supply noise present on a test Vcc pin closest to the MCU.
The significant improvement in noise level for the pre-production version at the MCU is similar to that achieved for the Prototype 4 (even slightly better), and this is probably due to reduced capacitive coupling into the ground plane by removing the ground copper from directly under the main supply inductor.
GA PP: 5V Power Supply Noise
Remembering, for context, that 4mV is still the same order of the least significant bit for a 5V 10 bit ADC sampler, as found in the ATmega1284p, and a one bit change in the LSB of the MCP4822 input generates a 1mV change in output.
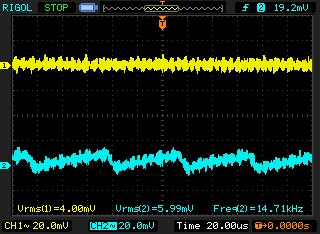
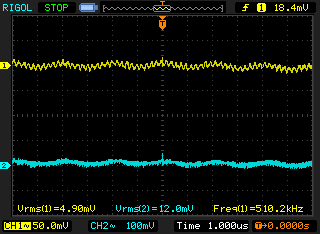
Checking the other power supplies on the board, Channel 1 (yellow) is the 3.3V positive supply, provided by a linear regulator. This supply is not used for analogue components, so the 4.0mV noise level is not critical, but never the less it is slightly less than on the Version P4.
Channel 2 (blue) below shows the -3V supply for the Operational Amplifier. This shows that the supply voltage noise of 5.9mV after filtering by a first order LC filter further smooth this supply. Compared to the Version P4 with no filtering (shown below) the noise is reduced substantially. The Version P4 shows a 10mV ramp, because it is a capacitive charge switching device. The addition of this LC filter was the one substantial change from the Prototype 4, so it is good to see the positive effect on the negative supply input to the Op Amp.
GA PP: 3.3V and -3V Power Supply Noise
GA P4: 3.3V & -3V Power Supply Noise
Analogue Output
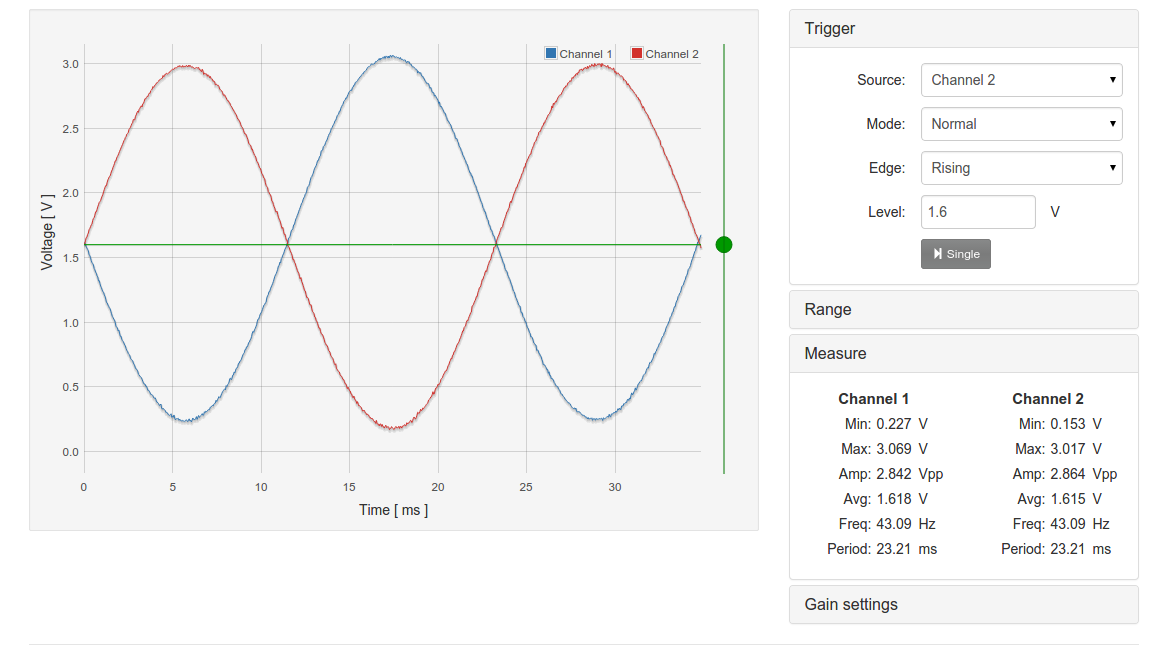
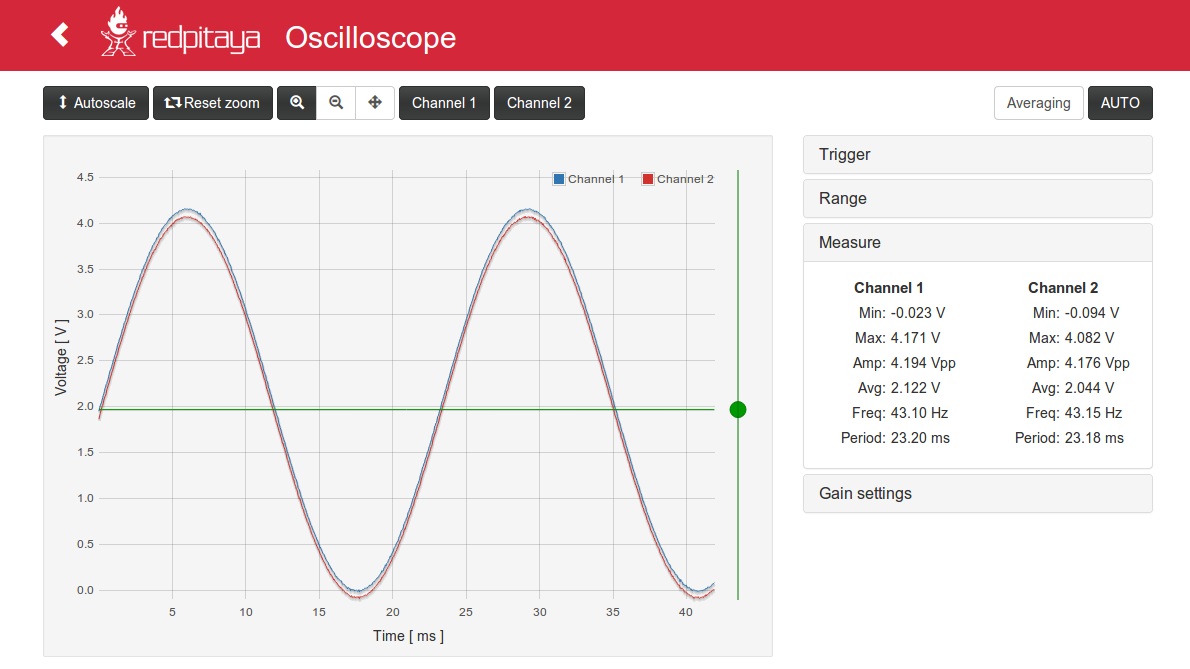
The standard test that I’ve been using throughout the development is to feed in a 43.1Hz Sine wave generated from a 1024 value 16 bit LUT. The sampling rate is 44.1kHz, which is generated by Timer 1 to get the closest match.
The spectra and oscilloscope charts below can be directly compared to the testing done with prototype Version P4 and earlier versions of the Goldilocks Analogue.
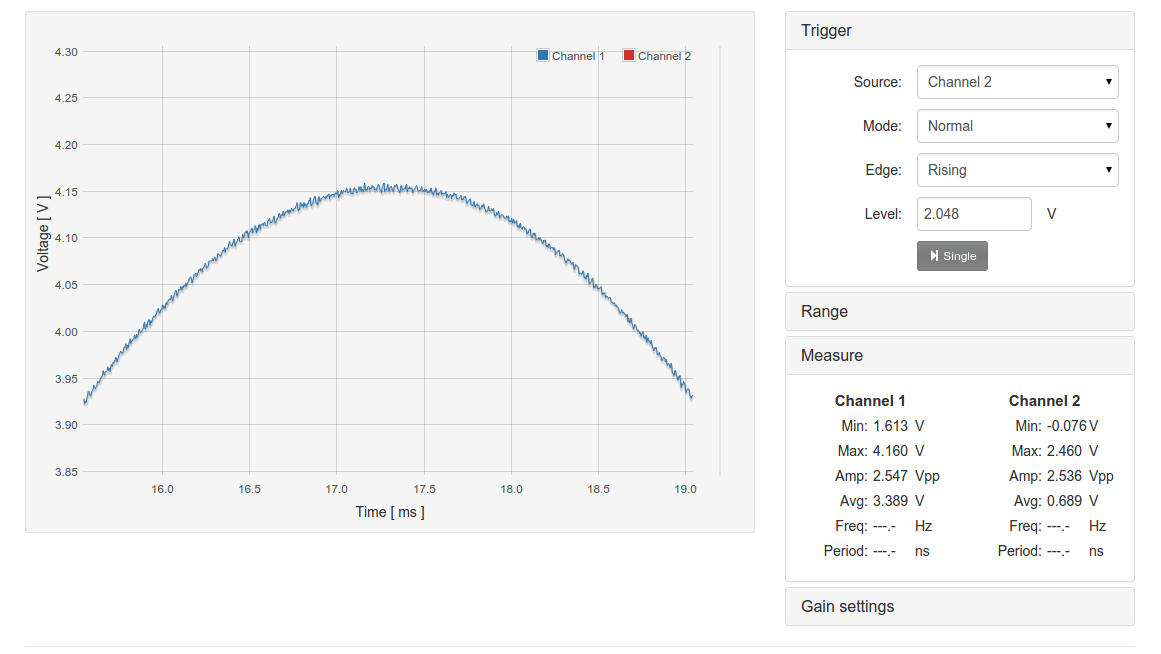
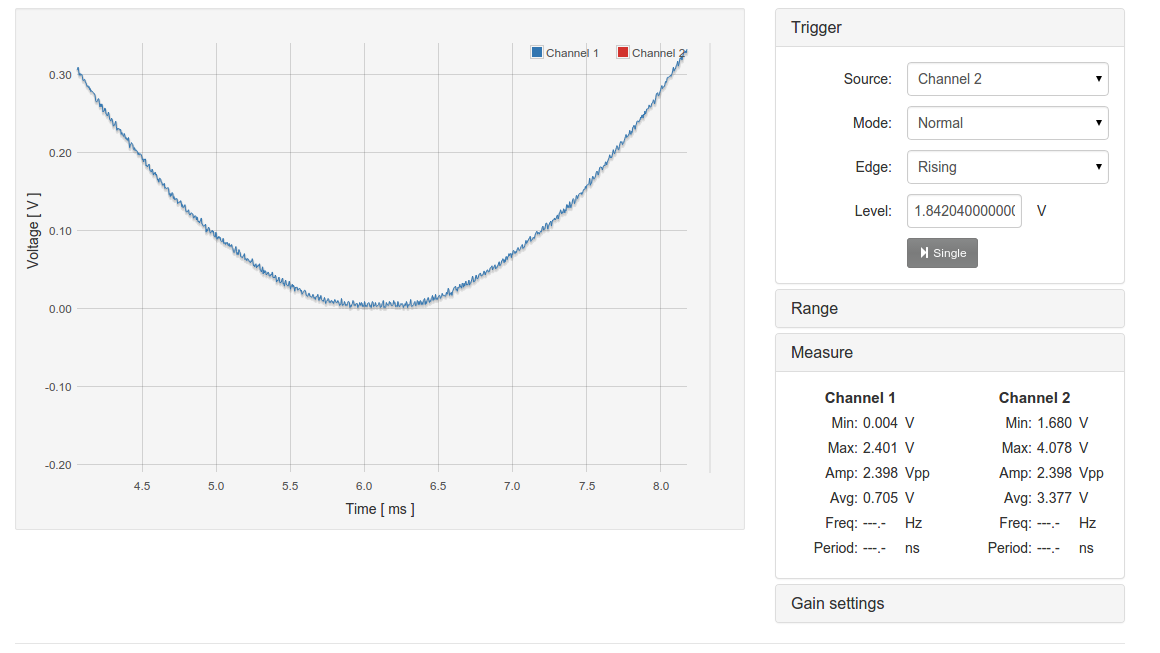
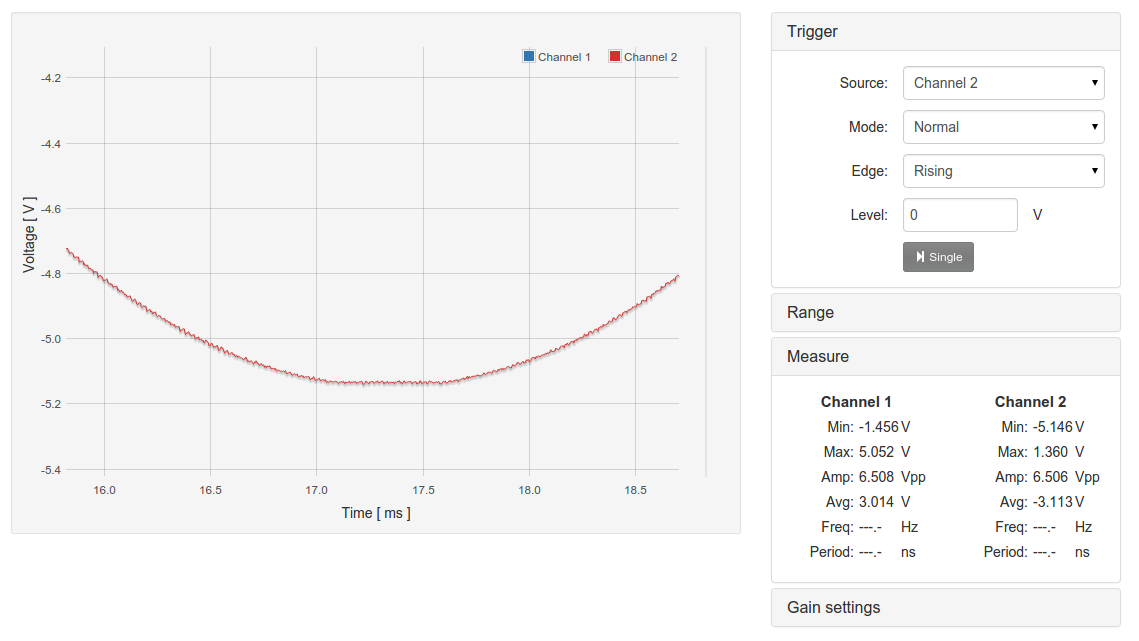
The below chart shows the sine wave generated at the output of the Op Amp. This is exactly as we would like to see, with no compression of either the 4.096V peak, or the 0V trough.
GA PP: 43Hz Sine Wave – Two Channels – One Channel Inverted
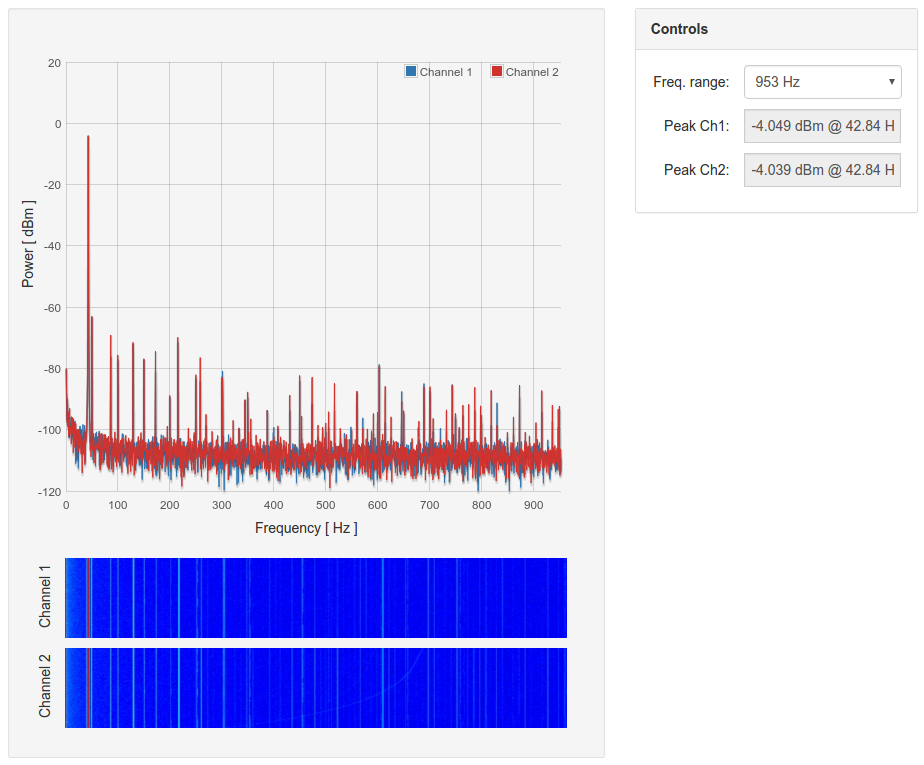
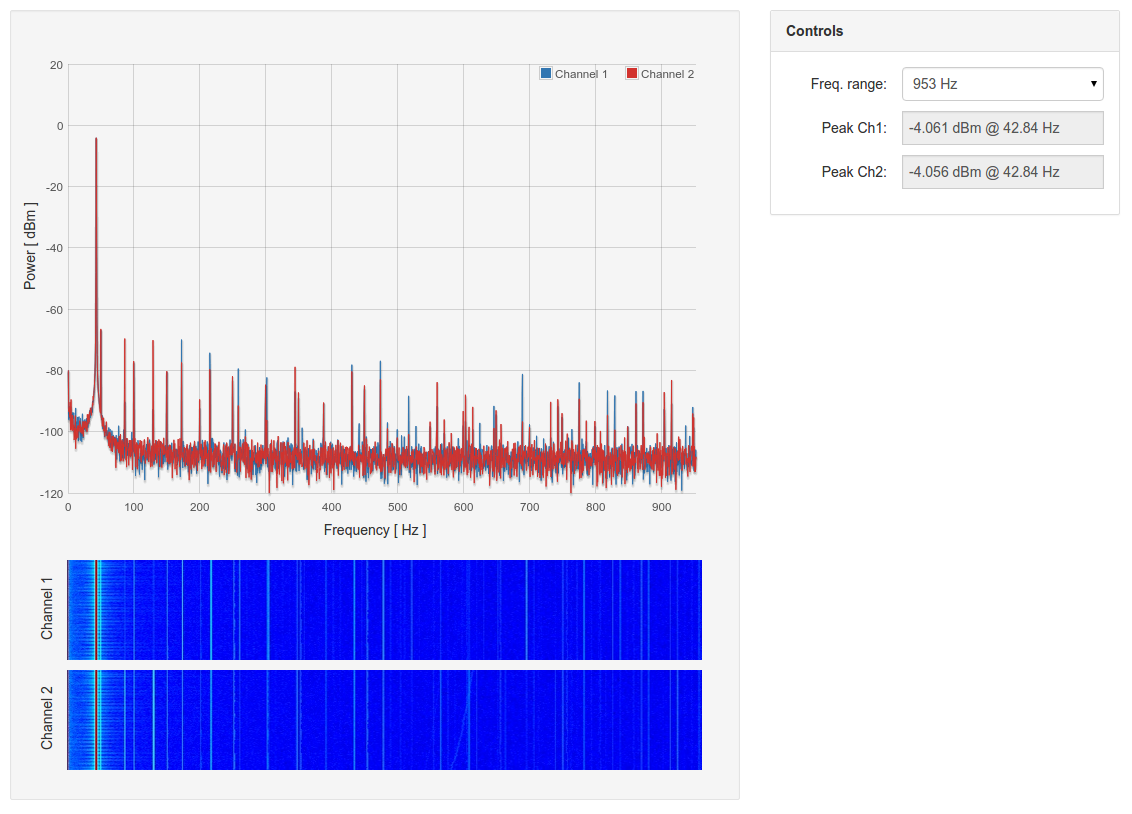
Looking at the spectra generated up to 953Hz it is possible to see harmonics from the Sine Wave, and other low frequency noise.
The spectrum produced by the Goldilocks Analogue shows most distortion is below -70dB, and that the noise floor lies below -100dB. The pre-production sample shows slightly higher noise carriers than the Version P4, but the difference is not substantial.
GA PP: 43.1Hz Sine Wave – 953Hz Spectrum
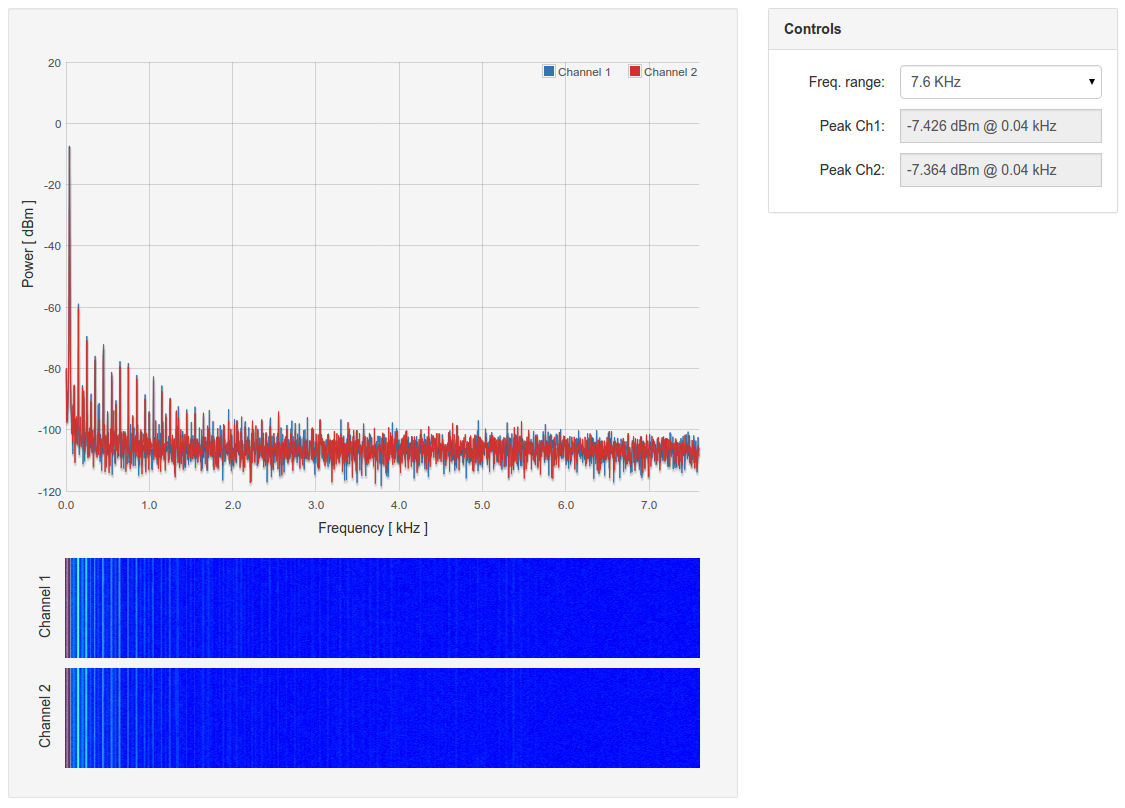
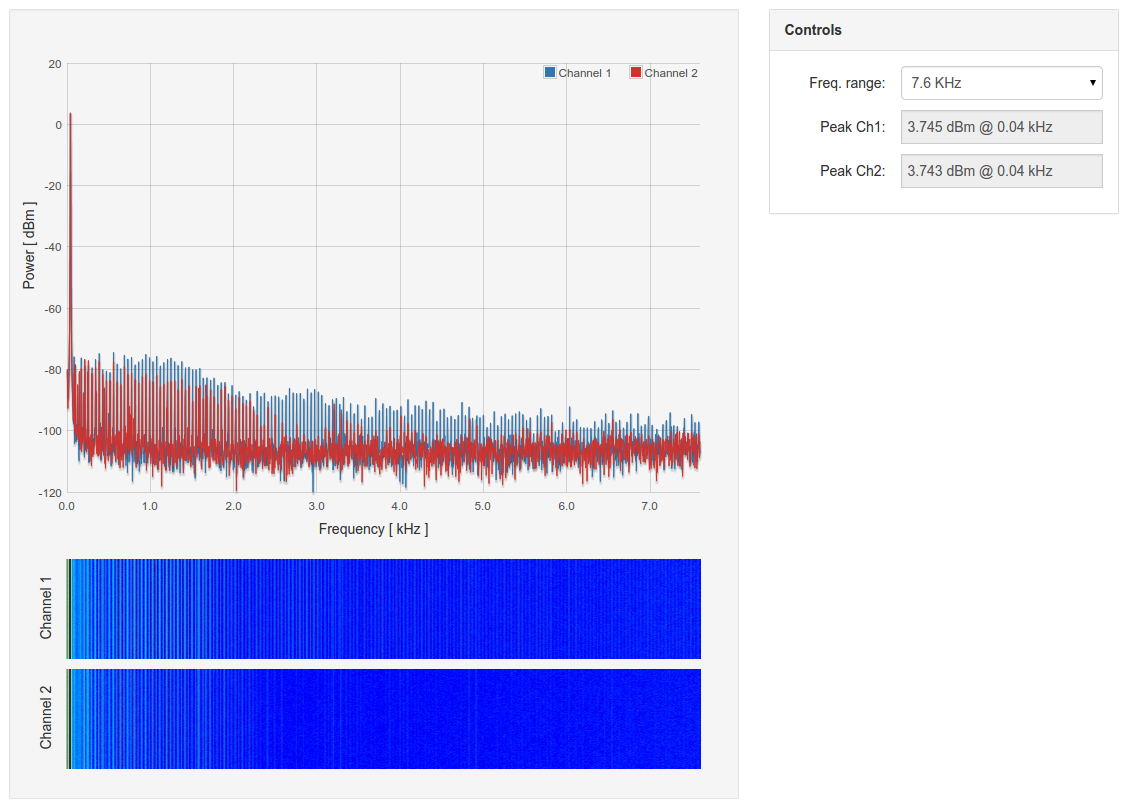
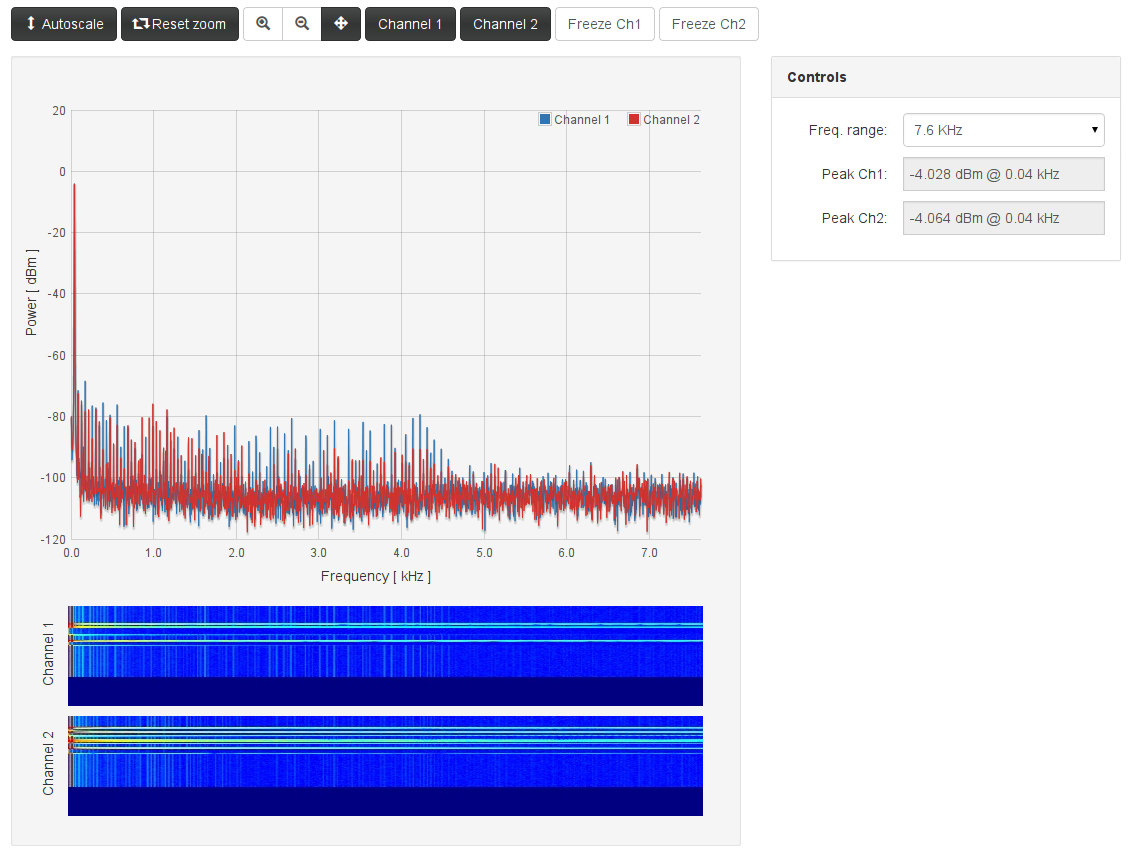
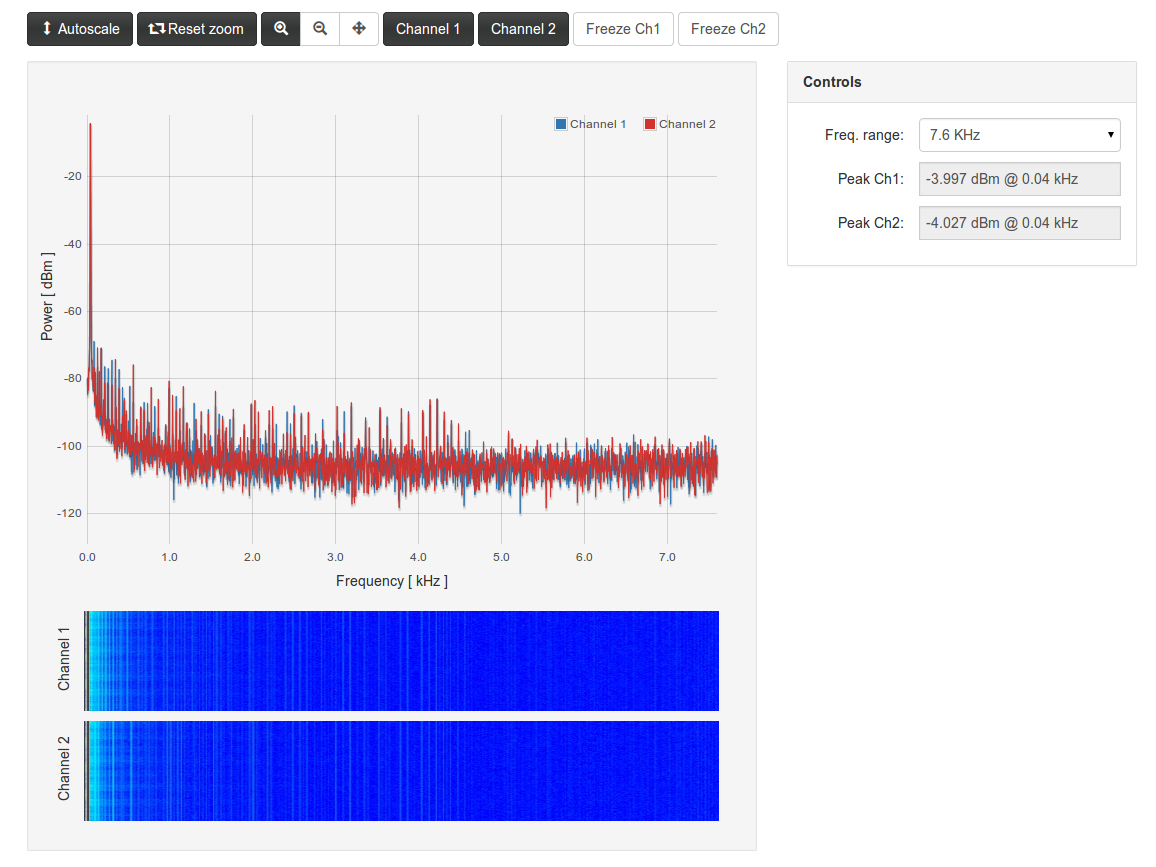
In the spectrum out to 7.6kHz we are looking at the clearly audible range, which is the main use case for the device.
The Goldilocks Analogue has noise carriers out to around 4.5kHz, but they are all below -80dB. After 4.5kHz the only noise remains below -100dB.
GA PP: 43.1Hz Sine Wave – 7k6Hz Spectrum
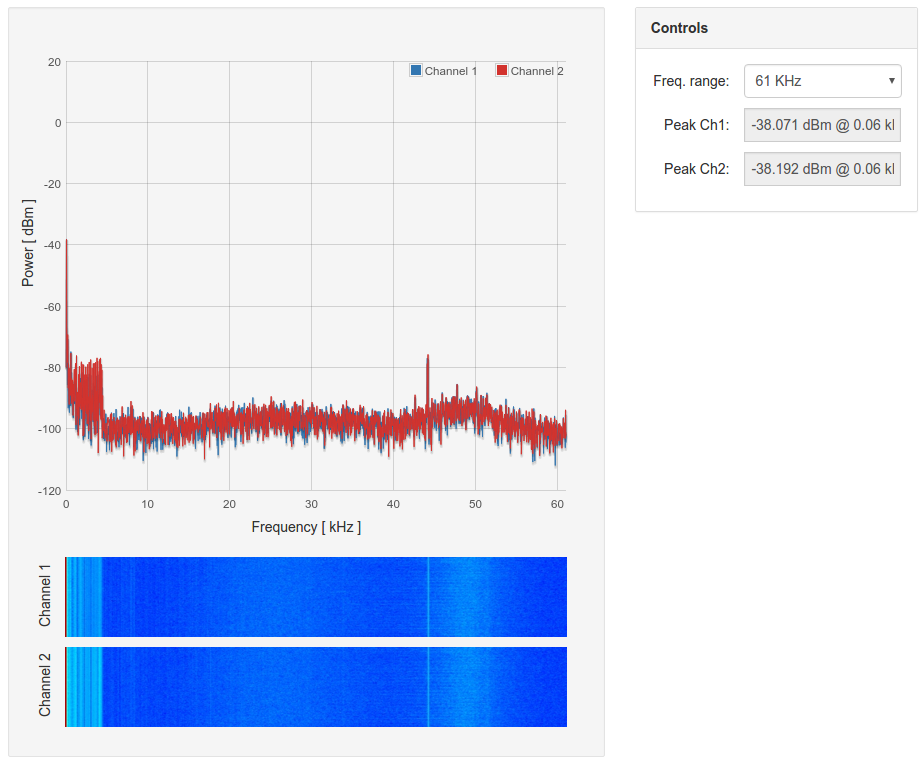
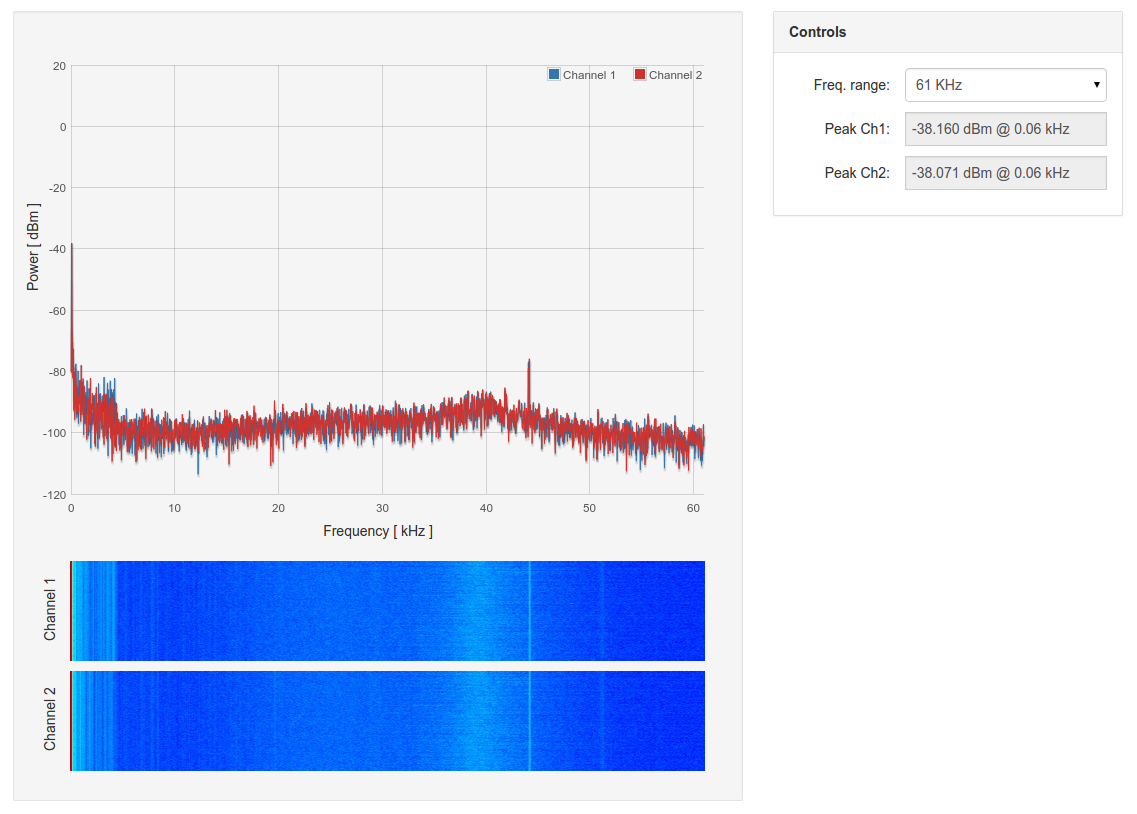
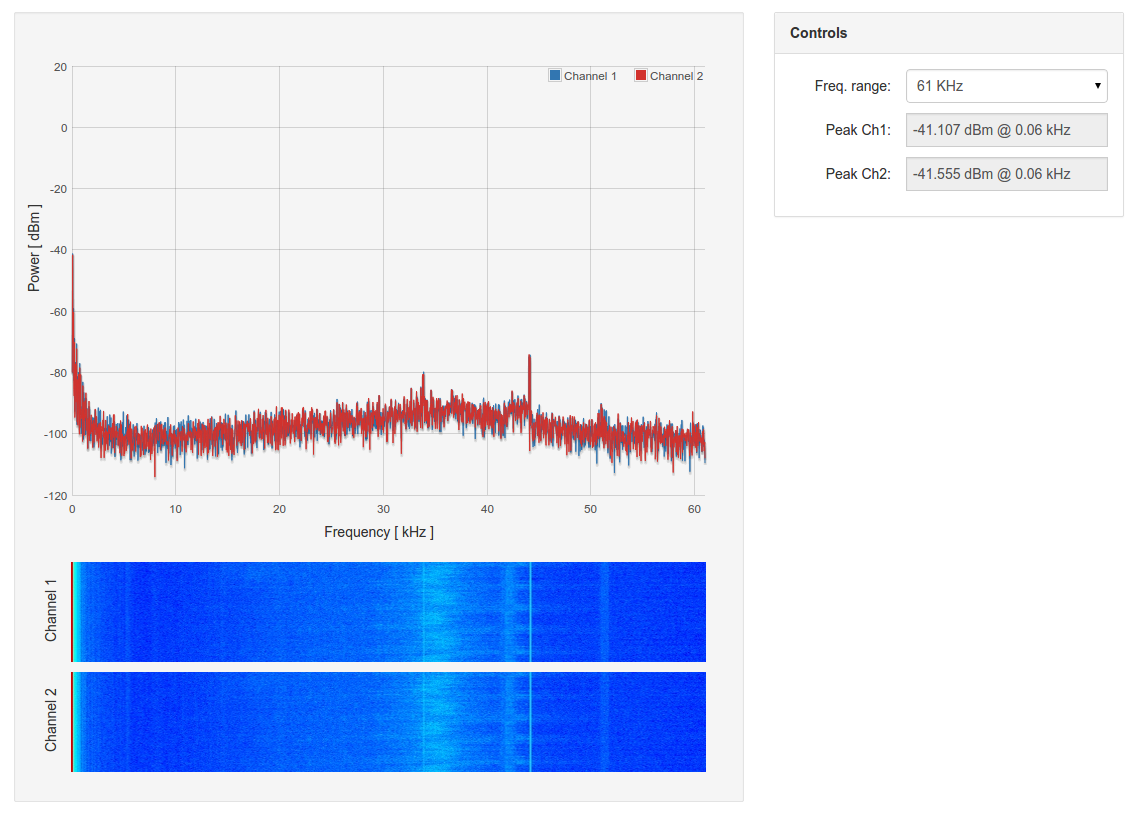
The spectra out to 61kHz should show a noise carrier generated by the reconstruction frequency of 44.1kHz.
The Goldilocks Analogue shows the spectrum maintains is low noise level below -90dB right out to the end of the audible range, and further out to the reconstruction carrier at 44.1kHz.
GA PP: 43.1Hz Sine Wave – 61kHz Spectrum
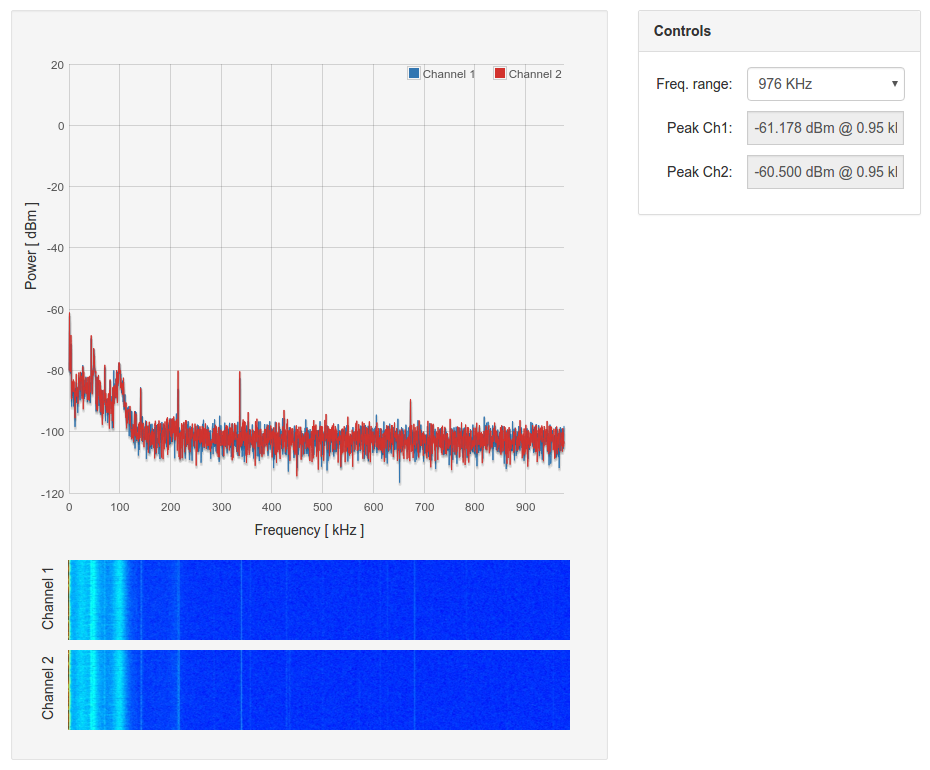
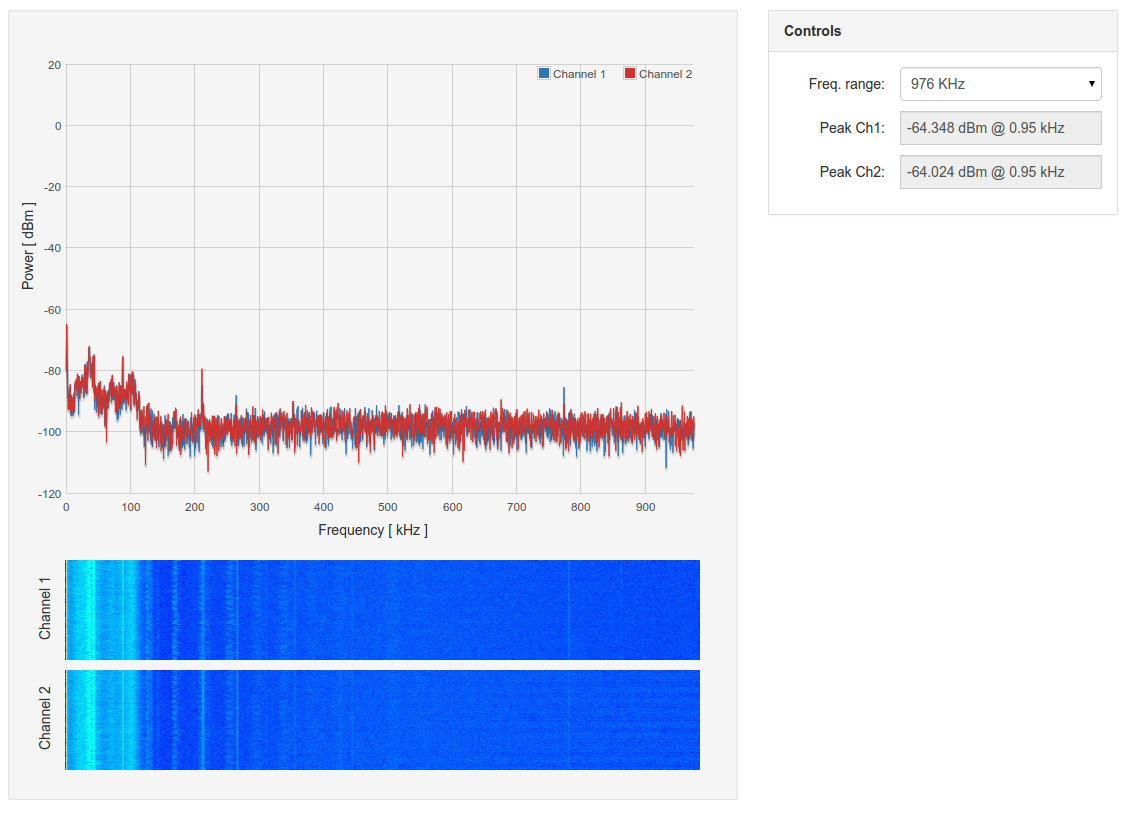
The final spectrum shows the signal out to 976kHz. We’d normally expect to simply see the noise floor, beyond the 44.1kHz reconstruction carrier noise.
The Goldilocks Analogue has a noise carrier at around 210kHz, probably generated by the -3V supply. The noise carrier at 340kHz is generated through the 5V SMPS supply, and is absent when powered by USB socket. Aside from the two carriers mentioned, there is no further noise out to 976kHz.
GA PP: 43.1Hz Sine Wave – 976kHz Spectrum
The Pre-production analogue output works as specified, and is essentially identical to the analogue output on the Prototype 4. It can maintain the 72dB SNR required, of which it should theoretically be capable.
I’ve been working on the Goldilocks Analogue now for so long that its been the centerpiece of my coding evenings for the past 18 months. This is the first time that I’ve designed a piece of hardware, and I’ve managed to make many mistakes (or learnings) along the way, so I think that every step of the process has been worthwhile.
Goldilocks Analogue Prototype 4 – Rotating
In this project, I’ve learned about Digital to Analogue Converters, Operational Amplifiers, Voltage translation, Switching Power Supplies, and most importantly have gained a working knowledge of the Eagle PCB design tools.
Version History
The original Goldilocks Project was specifically about getting the ATmega1284p MCU onto a format equivalent to the Arduino Uno R3. The main goal was to get more SRAM and Flash memory into the same physical footprint used by traditional Arduino (pre-R3) and latest release Uno R3 shields.
The Goldilocks project achieved that goal, but the resulting ATmega platform still lacked one function that I believe is necessary; a high quality analogue capability. The world is analogue, but having an ADC capability, without having a corresponding digital-to-analogue capability, is like having a real world recorder (the ADC capability) with no means to playback and recover these real world recordings.
A major initiative of the Goldilocks is to bring an analogue capability to the Arduino platform via a DAC, so this project was called the Goldilocks Analogue. Following a Kickstarter campaign, the Goldilocks Analogue is now available on Tindie.
Version 1 implemented the MCP4822 DAC buffered with an expensive, very musical, Burr Brown Operational Amplifier. Although the DAC performed exactly as designed, I neglected to provide the Op Amp with a negative supply rail, so it could not approach 0V required to reproduce the full range of output available (0v to 4.096V) from the DAC. That was a mistake.
Version 1 also reverted the USB to Serial interface to use a proper FTDI FT232R device from the ATmega32u2 MCU (the solution preferred now by Arduino). Using the ATmega32u2 (or ATmega16u2) to interface with anything not running at its own 16MHz CPU clock rate is broken and doesn’t work. This is because the ATmega devices don’t produce correct serial when their CPU clock is not a clean multiple of the USART required rate. I learned this the hard way with the Goldilocks Project.
Finally Version 1 implemented a buffered microSD card interface, using devices suitable to convert from 5V to 3.3V (SCK, MOSI, CS), and 3.3V to 5V (MISO) for the SPI interface. This was a correct implementation, but later I removed it because sometimes I’m really too smart for my own good.
Goldilocks Analogue – Version P1
Some significant rework of the analogue section was required for Version 2. Firstly, I decided that audio was a significant use case for the Goldilocks Analogue so it was worth while reducing the cost of the Op Amp, and sharing that expenditure with a special purpose headphone amplifier, working in parallel with the Op Amp.
The TPA6132A2 headphone amplifier was found, and implemented into the prototype. This “DirectPath” device removes the need for large output capacitors in the signal path, as it provides a zero centred output from a single supply voltage.
Version 2 also had a lesser but fully adequate TS922A Op Amp for providing DC to full rate signals, buffering the MCP4822 DAC. I had learned that Op Amps need to be provided with a negative supply rail, if they are to achieve 0V output under load.
To create a negative supply rail for the Version 2 Op Amp, I used a pair of TPS60403 voltage inverters producing -5V from the main power supply, and then fed that signal into a TPS72301 regulator configured to produce -1.186V. This design worked very well, but needed 3 devices to produce the output and also quite a lot of board space.
Finally, for Version 2, I changed the microSD voltage translation to use the TXS0104 (TXB0104) level translation products. These special purpose devices enable the bidirectional transfer of signals over voltage transitions. Normally these two device types (TXB / TXS) work very well, but somehow I couldn’t ever get either version to work properly, which caused the microSD card to never work. This exercise was a failure, and was reverted to normal buffer logic for Version 3.
Goldilocks Analogue – Version P2
Version 3 was supposed to be my final prototype prior to putting this into a crowd funding project. I made some fairly simple changes, and I was pretty happy with the outcome of Version 2 as it was.
Version 3 changed the MCP4822 DAC interface to use the USART1 interface present on the ATmega1284p MCU. Using the USART1 in MSPI Mode allows the DAC to operate independently of the normal SPI bus. This frees up timing constraints on the SPI interface so that slow microSD cards can be read and streamed to the DAC, or SPI graphics interfaces can be used as in the case of the synthesiser demonstration.
As part of the testing, I found that the ATmega1284p would operate successfully at 24.576MHz. This is a magic frequency because it allows an 8 bit timer to reproduce all of the major audio sampling rates related to 48kHz. I’ve tested using this frequency and everything is working fine.
Obviously there was some feature creep over the course of experimentation, so I decided to add two SPI memory device layouts to the PCB. This would allow up to 23LC1024 256kByte of SRAM to be addressed, together with AT25M01 256kByte of EEPROM, for example. Putting these layouts on the board meant that the JTAG interface had to be moved to the back of the PCB. This was actually not a bad thing, as it would have been impossible to use the JTAG interface with a Shield in place anyway.
I was asked to beef up the 3.3V supply capability of the Goldilocks Analogue, so I added a AP1117 device capable of up to 1A supply, upgrading from 150mA.
Goldilocks Analogue – Version P3
Version 4 added the feature of amplified Microphone Input. Using the MAX9814 Mic Amp electret microphones present in the normal headsets used with smart-phones can act as an audio input to the Goldilocks Analogue. The amplified signal is presented on Pin A7, which falls outside of the normal Arduino Uno R3 footprint. For completeness, I also added a level shifted non-amplified signal (for line-in) to Pin A6.
Because of the extra microphone amplifier circuitry, I needed to reduce the footprint of the negative supply rail. So I used a regulated -3V device LTC1983 to produce the negative supply rail required for the Op Amp. There are now 3 regulators on the Goldilocks Analogue, 5V at up to 2.4A, 3.3V at up to 1A, and -3V at 100mA.
Version 4 also saw the last of the through hole components gone. Both the main crystal and the 32kHz clock crystal were reformatted into surface mount technology. This reduces the flexibility of the platform, but it makes manufacturing a bit easier.
Goldilocks Analogue – Version P4
Version 4 is the end. There will be some minor adjustments to the board for the production version. But, finally, I think this is it.
Unboxing
Prototype 4 back from manufacturing
Errata
There is no power supply jumper provided. Add this to the BOM.
The EEPROM is built with SOIC8 Wide Body, but it should be Narrow Body. Fix the BOM.
Labels for the recommended power supply Voltage are partially obscured by power jack. Move the labels.
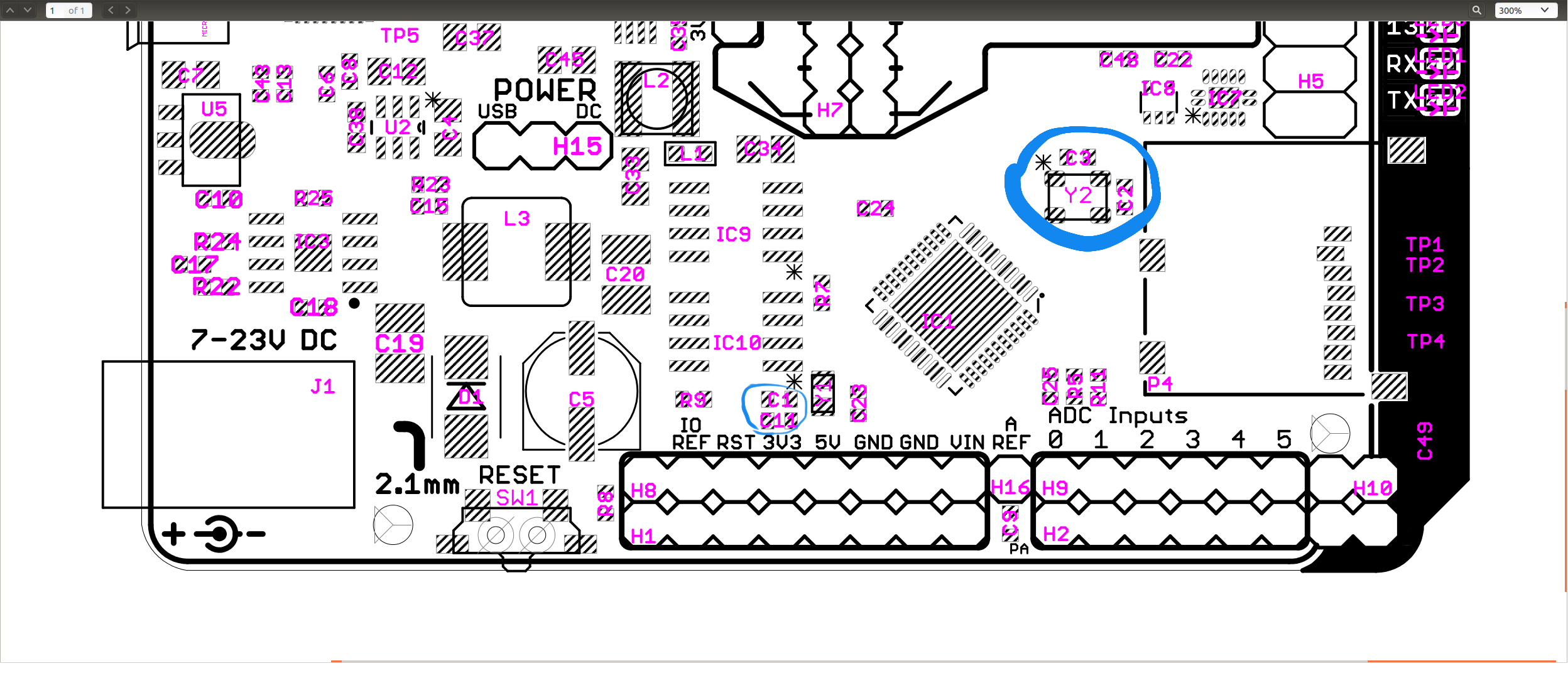
The main crystal doesn’t oscillate, because the Eagle library had an incorrect footprint.
Tested to work by rotating the crystal on its existing footprint.
Respecify the main MCU crystal to the Atmel recommended type.
Change C2 and C3 to 15pF in line with Atmel recommendation.
Change C1 and C11 to 12pF in line with Atmel recommendation.
Change R18 to 100kOhm, to bias the Analogue Line in correctly.
Add a simple LC filter to the -3.3V supply, using the known inductor and 10uF capacitor.
Tie Mic Gain to AVcc with a separable link, to produce 40dB default gain. This is the setting required for most normal microphones, so will improve the “out of box” experience for most users.
Testing
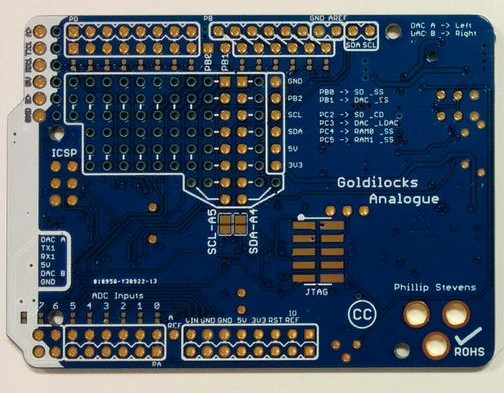
Version P4 – Front
Version P4 – Back
Power Supplies
First, looking at power supply noise, we’ve got a slightly better result for noise at the power supply over the Prototype 1. Prototype 1 used the EUP3476 Switched Mode supply device. Problems with obtaining ready supply of this device led to changing it to the AP6503, which is pin compatible but needs slightly different voltage selection resistors. In contrast to the Arduino Uno and other devices, this is very good.
We remember that 1mV represents the Voltage change in the least significant bit of the 12 bit MCP4822. The least significant bit of the ATmega1283p 10 bit ADC is about 4mV. Sampling voltages similar to the noise level inherent on the platform will not generate any further accuracy.
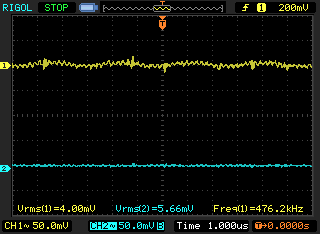
GA P4: 5V Power Supply Noise
Channel 1 (yellow) is 4.0mV of noise present at the output capacitor for the power supply, and represents the lowest noise inherent in the supply. Channel 2 (blue) is the 5.6mV supply noise present on a test pin closest to the MCU.
The significant improvement in noise level for the GA4 version at the MCU may be due to the currently decreased system clock rate, and therefore is subject to confirmation.
GA P1: 5V Power Supply Noise
Checking the other power supplies on the board, Channel 1 (yellow) is the 3.3V positive supply, provided by a linear regulator. This supply is not used for analogue components, so the 4.3mV noise level is not critical.
Channel 2 (blue) below shows the -3V supply for the Operational Amplifier. This shows a 10mV supply voltage ramp, generated because it is a capacitive charge switching device. This is not particularly good, and it will be worth adding an LC filter to attempt to further smooth this supply, for the production Goldilocks Analogue.
GA P4: 3.3V & -3V Power Supply Noise
Microphone Input
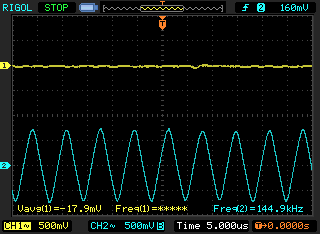
Microphone amplifier works.
Interestingly, when the amplifier is set to 60dB gain (default setting, Channel 2, blue) it oscillates at 144kHz when not connected to anything, while it doesn’t do this with the normal gain setting of 40dB (Channel 1, yellow) based on the amplification required for typical smartphone headphones. In either case, as soon as the Mic input is grounded, the Mic output reduces to less than 4mVAC on the correct bias of 1.25VDC.
Suggest to make 40dB amplification the default setting for the production Goldilocks Analogue, but allowing the connection to be segmented for increased amplification if required.
GA4 – Mic Oscillation Comparison at 40dB (CH1) and 60dB (CH2) amplification.
Line-In (PA6) seems to be biased at 1.07V rather than 1.25V. Check calculation again… Doh! R18 should be 100kOhm.
Analogue Output
The standard test that I’ve been using throughout the development is to feed in a 43.1Hz Sine wave generated from a 1024 value 16 bit LUT. The sampling rate is 44.1kHz, which is generated by Timer 1 to get the closest match.
The spectra and oscilloscope charts below can be directly compared to the testing done with previous prototype versions of the Goldilocks Analogue.
The below chart shows the sine wave generated at the output of the Op Amp. This is exactly as we would like to see, with no compression of either the 4.096V peak, or the 0V trough.
Goldilocks Analogue P4 – 43Hz Sine Wave – Two Channels – One Channel Inverted
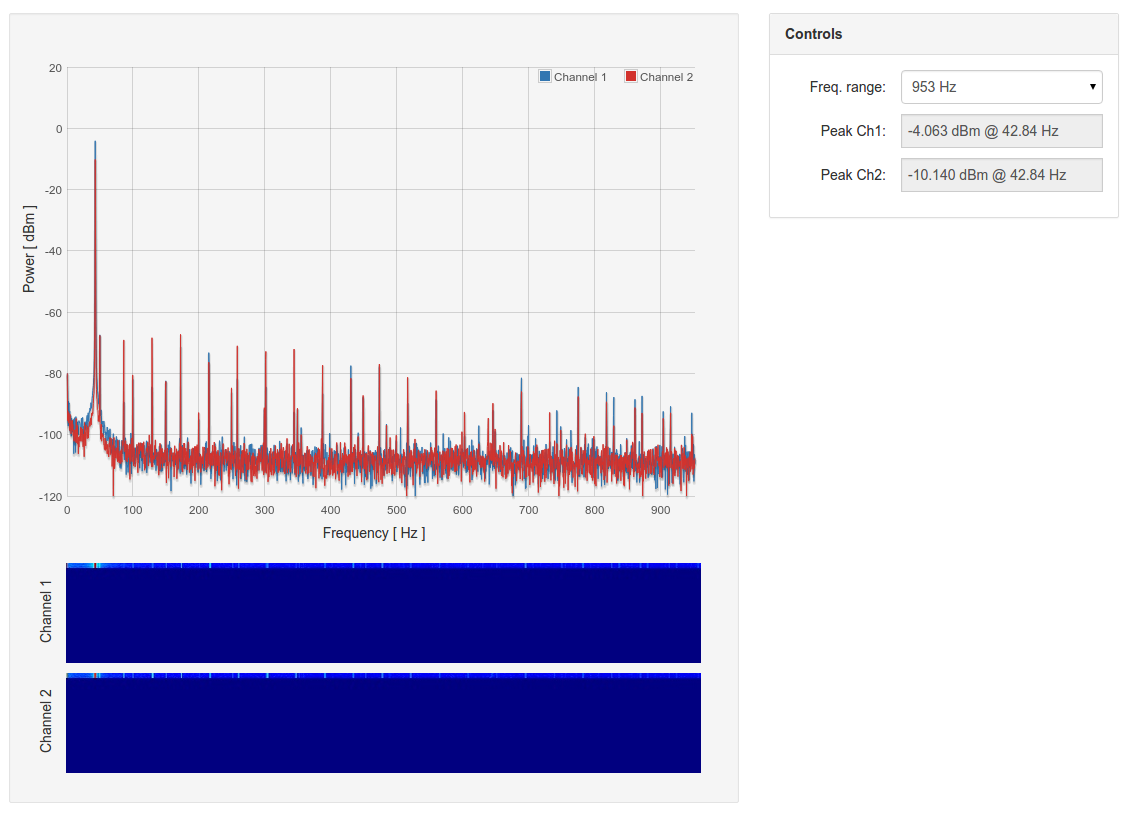
Looking at the spectra generated up to 953Hz it is possible to see harmonics from the Sine Wave, and other low frequency noise.
The spectrum produced by the Goldilocks Analogue shows most distortion is below -70dB, and that the noise floor lies below -100dB.
Goldilocks Analogue P4 – 43.1Hz Sine Wave – 953Hz Spectrum
Comparing the same DAC output channel A from Op Amp (Channel 1 – Blue) with the same Headphone Amp Left (Channel 2 – Red), we see slightly more noise carriers.
Goldilocks Analogue P4 – 43.1Hz Sine Wave – 953Hz Spectrum – Headphone in Red
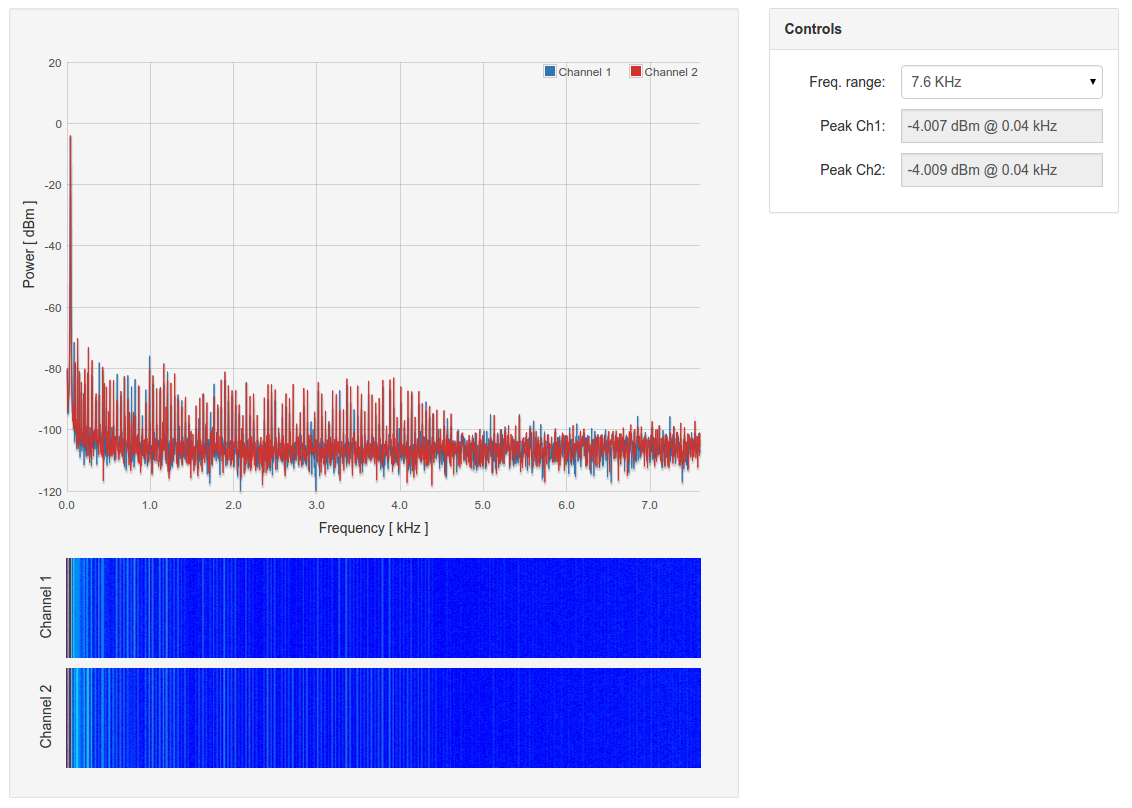
In the spectrum out to 7.6kHz we are looking at the clearly audible range, which is the main use case for the device.
The Goldilocks Analogue has noise carriers out to around 4.5kHz, but they are all below -80dB. After 4.5kHz the only noise remains below -100dB.
Goldilocks Analogue P4 – 43.1Hz Sine Wave – 7.6kHz Spectrum
The spectra out to 61kHz should show a noise carrier generated by the reconstruction frequency of 44.1kHz.
The Goldilocks Analogue shows the spectrum maintains is low noise level below -90dB right out to the end of the audible range, and further out to the reconstruction carrier at 44.1kHz.
Goldilocks Analogue P4 – 43.1Hz Sine Wave – 61kHz Spectrum
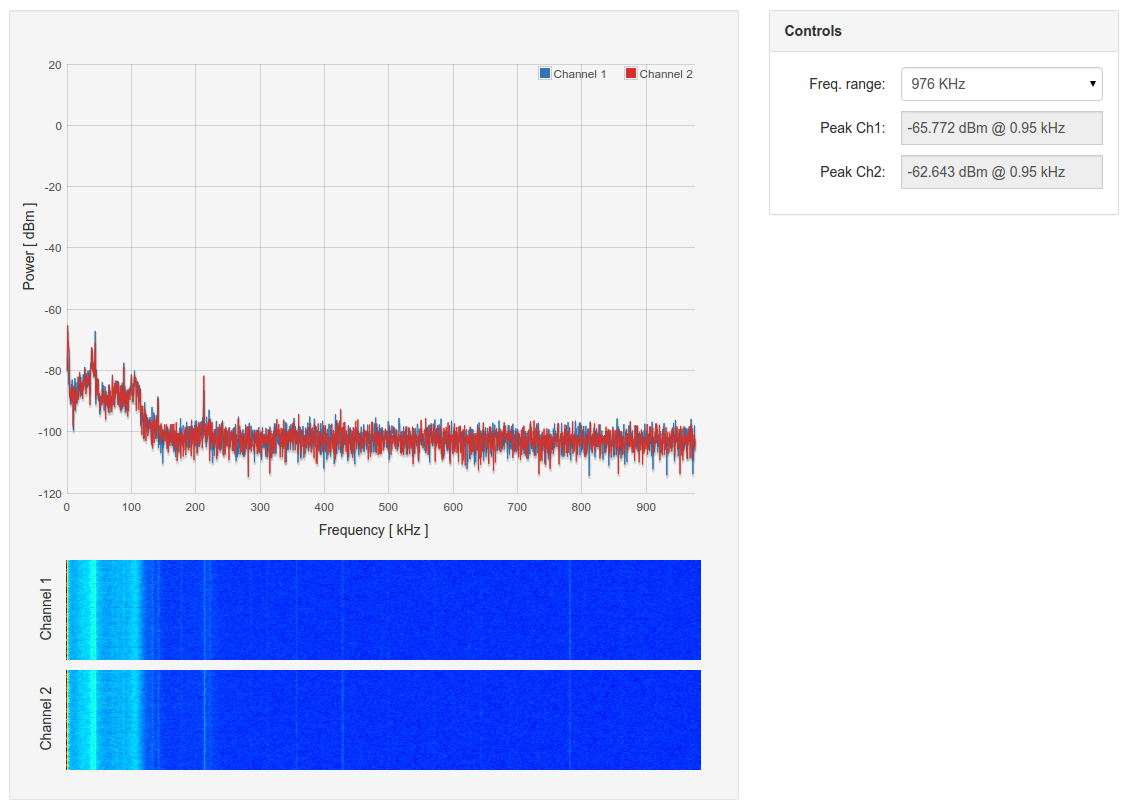
The final spectrum shows the signal out to 976kHz. We’d normally expect to simply see the noise floor, beyond the 44.1kHz reconstruction carrier noise.
The Goldilocks Analogue has a noise carrier at around 210kHz. Aside from the single carrier mentioned, there is no further noise out to 976kHz.
Goldilocks Analogue P4 – 43.1Hz Sine Wave – 976kHz Spectrum
Analogue output works as specified. It can maintain the 72dB SNR required, of which it should theoretically be capable.
SPI Devices
MicroSD works.
SPI SRAM / EEPROM devices work.
Tests for REWORK
These tests are for the factory rework of the prototype boards.
Check 5V Power Supply
Plug 7-23VDC positive centre into J1.
CHECK: that there is 5VDC available on H15 DC Pin.
Check 3.3V and -3V Power Supply
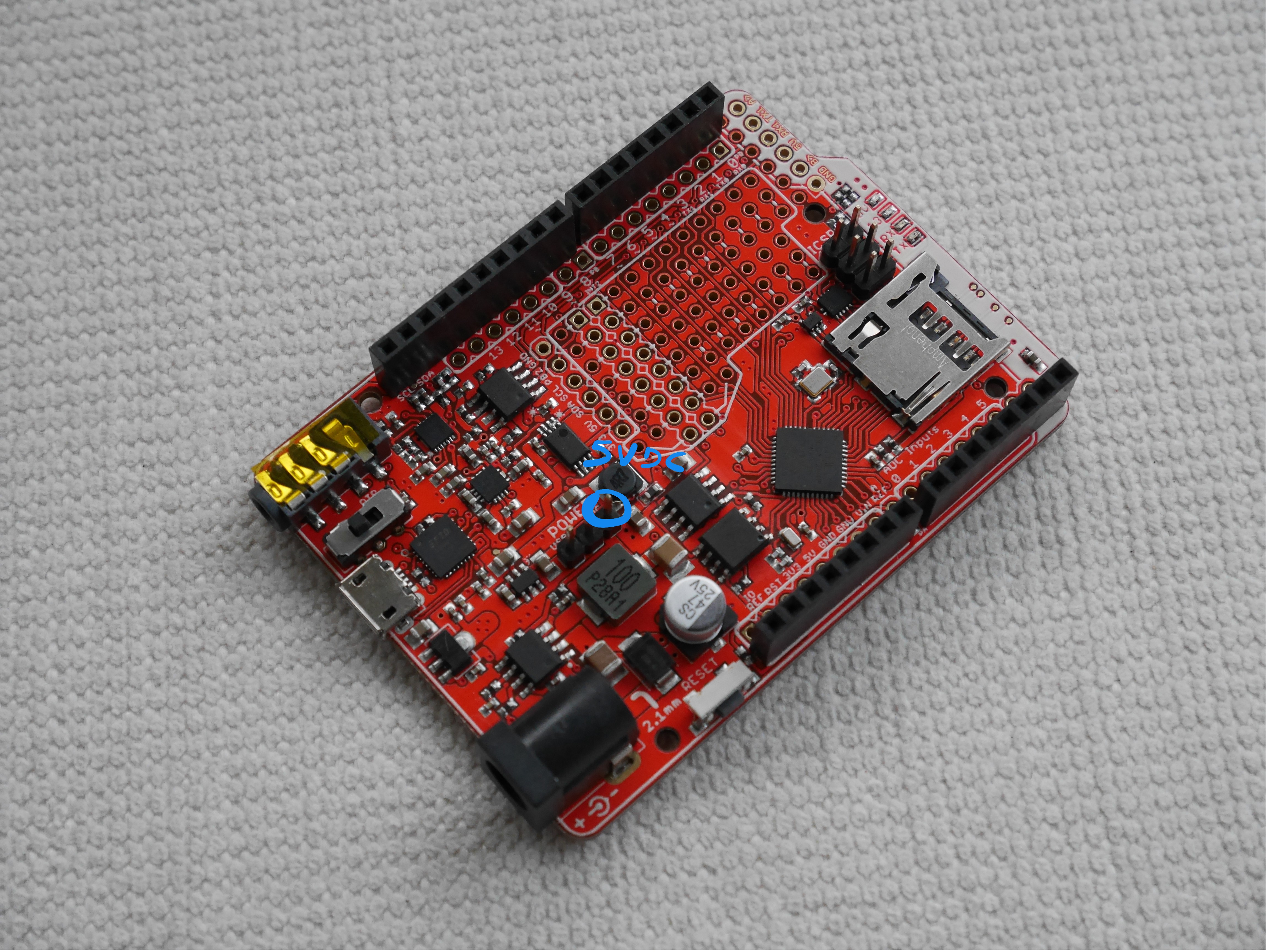
Add a jumper to J1 from the centre pin to DC Pin.
CHECK: that 5VDC, 3.3VDC, and -3VDC is available at the test points indicated.
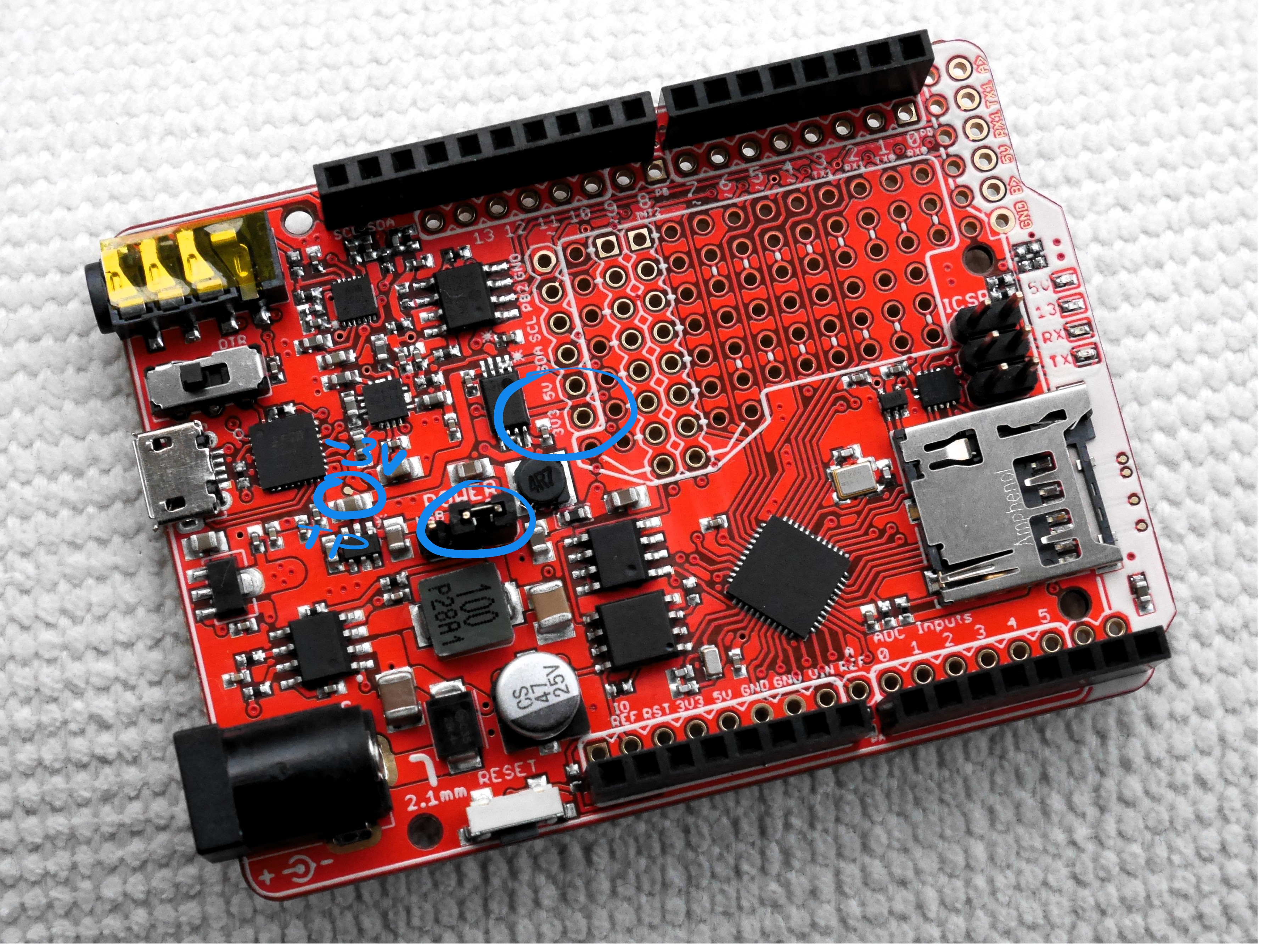
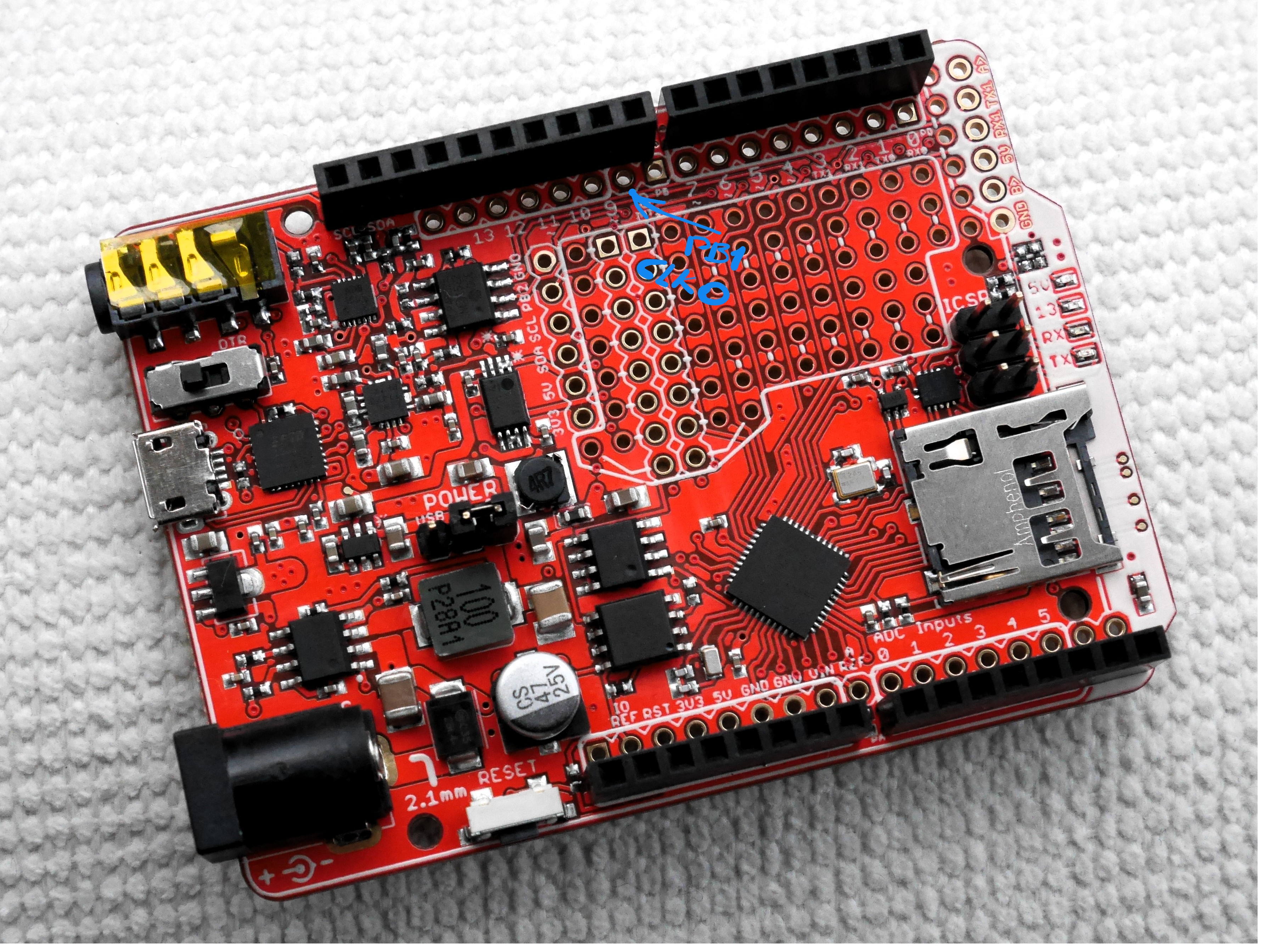
Check for Internal RC Oscillator Function
Connect an AVRISP Mk2 in circuit programmer to the ICSP Socket.
Use the following command to enable the CLKO on PB1, and set other fuses correctly.
Connect the Goldilocks Analogue to a USB port and open a serial terminal at 38400 baud to the attached FTDI USB /dev/ttyUSB0 interface.
CHECK: Enter !!! into the serial terminal, immediately following a board RESET (using the RESET button). This will enable the Boot Monitor. These are the boot monitor commands.
Bootloader>
Bootloader>H Help
0=Zero addr (for all commands)
?=CPU stats
@=EEPROM test
B=Blink LED
E=Dump EEPROM
F=Dump FLASH
H=Help
L=List I/O Ports
Q=Quit
R=Dump RAM
V=show interrupt Vectors
Y=Port blink
Bootloader>
Bootloader>? CPU stats
Goldilocks explorer stk500v2
Compiled on = Oct 7 2015
CPU Type = ATmega1284P
__AVR_ARCH__= 51
GCC Version = 4.8.2
AVR LibC Ver= 1.8.0
CPU ID = 1E9705
Low fuse = D7
High fuse = D8
Ext fuse = FC
Lock fuse = FF
Close the serial terminal program (disconnect from the /dev/ttyUSB0 device).
Load Test Program
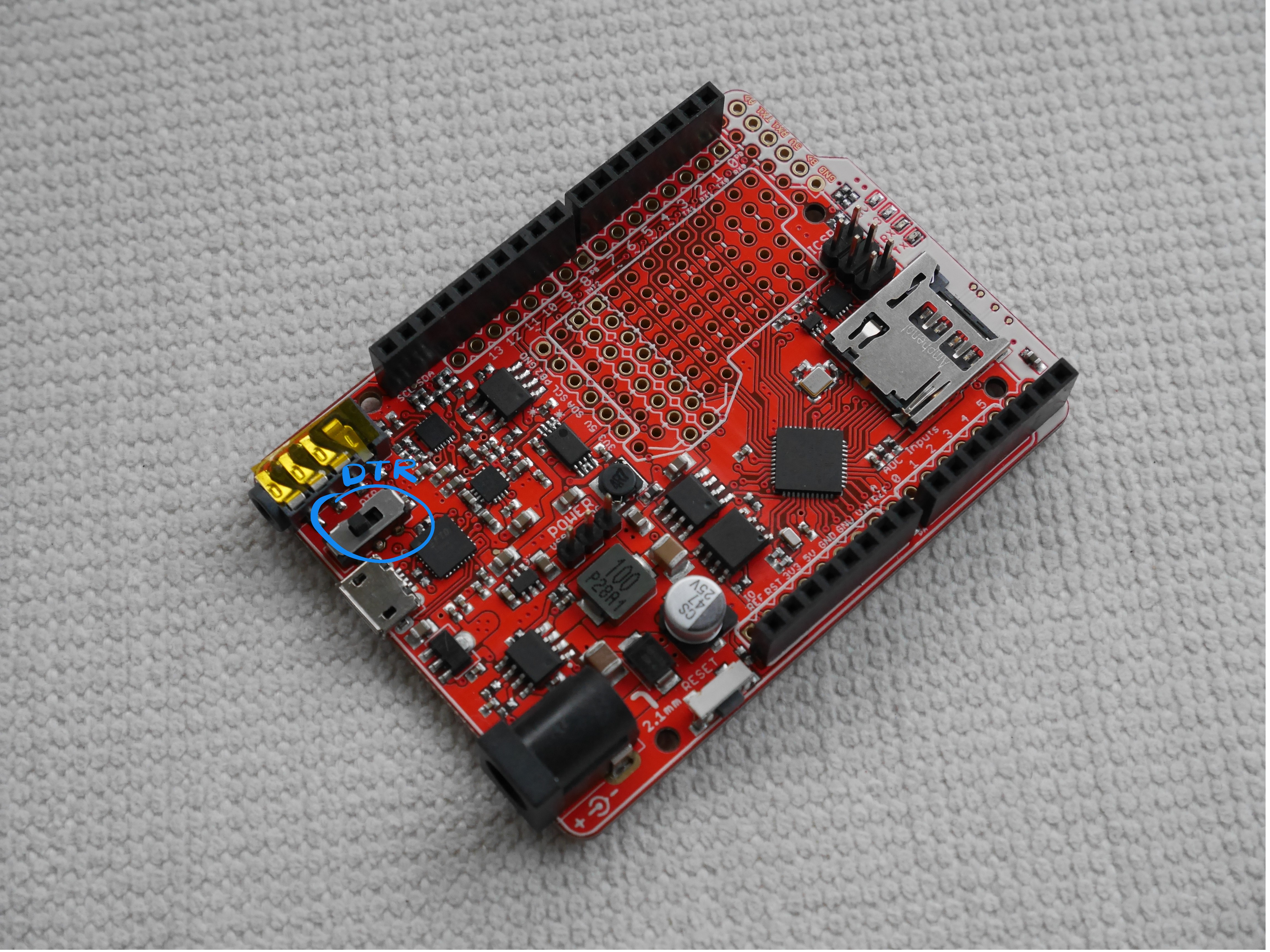
With the USB interface connected to the Goldilocks Analogue, and the DTR switch in the right most position (closest to DTR text; opposite position to the pictured position).
Use the following command to program a Test Suite using the provided HEX file.
Plug a standard smartphone headset (with microphone) with a 3.5mm TRRS connector in LRGM (left, right, ground, mic) configuration into the socket.
CHECK: Sound (echo of input) should be heard from the headphones, when speaking into the microphone.
Connect the Goldilocks Analogue to a USB port and open a serial terminal at 38400 baud to the attached FTDI USB /dev/ttyUSB0 interface.
CHECK: Information on each Task’s stack “Highwater” mark should be seen on the serial terminal.
Just over 6 months since the third iteration of the Goldilocks Analogue Prototyping was started, and now I’ve finished the design for a forth iteration. The Goldilocks Analogue Prototype 4 design is now finished, and I’m working out what the final bill of materials will cost to assemble into a final outcome. Testing for the Prototype 4 has begun, and everything is working as expected.
The third prototype was completely successful, and produced the improvements I was looking for. The use of the MSPI Mode on USART1 means that two SPI interfaces can be run in parallel, allowing the DAC to hold its tight timing requirements while slower SD card transactions take place (for example). This was proven through the implementation of a direct digital synthesiser, controlled by a SPI controlled touch screen.
Goldilocks Analogue – Prototype 3
Revision for Prototype 4
The Prototype 3 was supposed to be the final version, and it achieved everything that I set out in the original design specifications. But, then there was some feature creep.
Prototype 4 back from manufacturing
In discussing the TRS 3.5mm audio socket, a better more robust TRRS version was found. The realisation that it would be possible to have a microphone input, without requiring additional board space, led me to experiment with the Adafruit breakout board for the MAX9814 Microphone amplifier, and then to build a very simple Walkie-Talkie demonstration to test the use of audio input (with the integrated ADC), simultaneously with audio output (via the DAC).
Once the use of the MAX9814 was proven, I could implement a reference circuit as an input option. The amplified microphone input is connected to Pin 7 of the Analogue Port A. Conveniently, the MAX9814 delivers the amplified signal at +1.25V with a 2V peak to peak signal. This allows the sample to fall into the range of 0V to 2.56V internal reference voltage for the ATmega ADC, providing the maximum sampling resolution with no further adjustments.
The MAX9814 also includes an integrated microphone biasing circuitry, which is designed to support normal electret microphones.
As an alternative input functionality, the Prototype 4 also allows for LINE level inputs. I have used a voltage divider to reference the input signal to 1.25V DC. Although a 2V peak to peak Line level input will overload the Microphone amplifier, rendering the output signal on PA7 unusable, the LINE input is routed to Pin 6 on Port A will have exactly the right range to sample using the internal ATmega ADC voltage reference.
Both Port A Pin 6 and Pin 7 are outside of the normal Arduino UNO R3 footprint, so the normal functionality of the UNO footprint is not affected by either the two input options. And if desired, the connection can be separated at a solder-jumper on the rear of the board.
The additional space required for the microphone and line level input circuitry has been created by simplifying the negative supply rail for the Op-Amp. The Op-Amp is provided to support DC to 50k sample per second analogue output. To achieve a linear output from 0v to 4.096V the Op-Amp requires a negative supply voltage. In this revision, I have used a single LTC1983 regulated supply device to provide the negative -3V supply rail. The outcome should be equivalent to the Prototype 3 solution, which used 3 devices.
Board Layout
The final board layout has been completed, and the board is now in discussion for manufacturing.
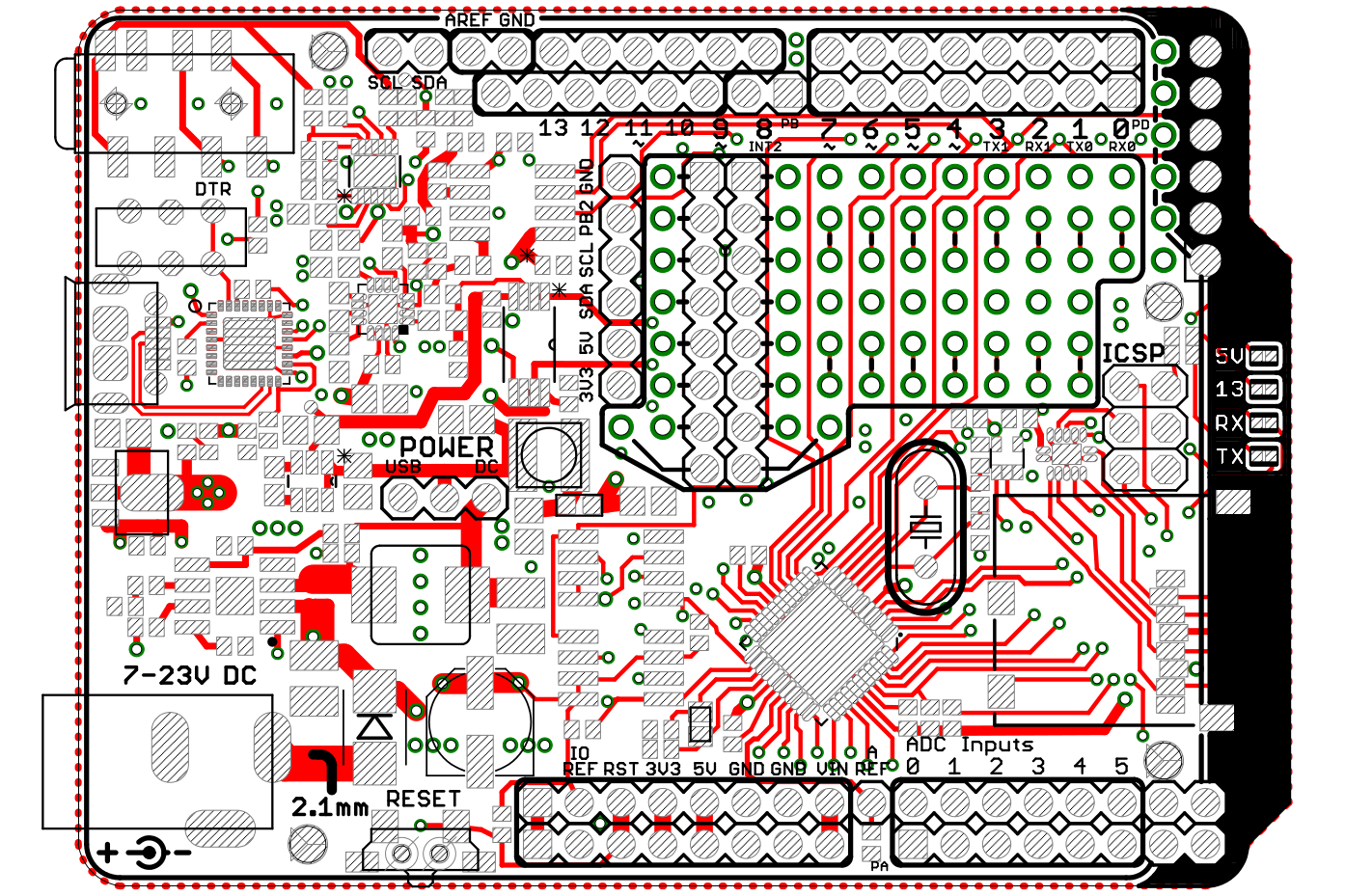
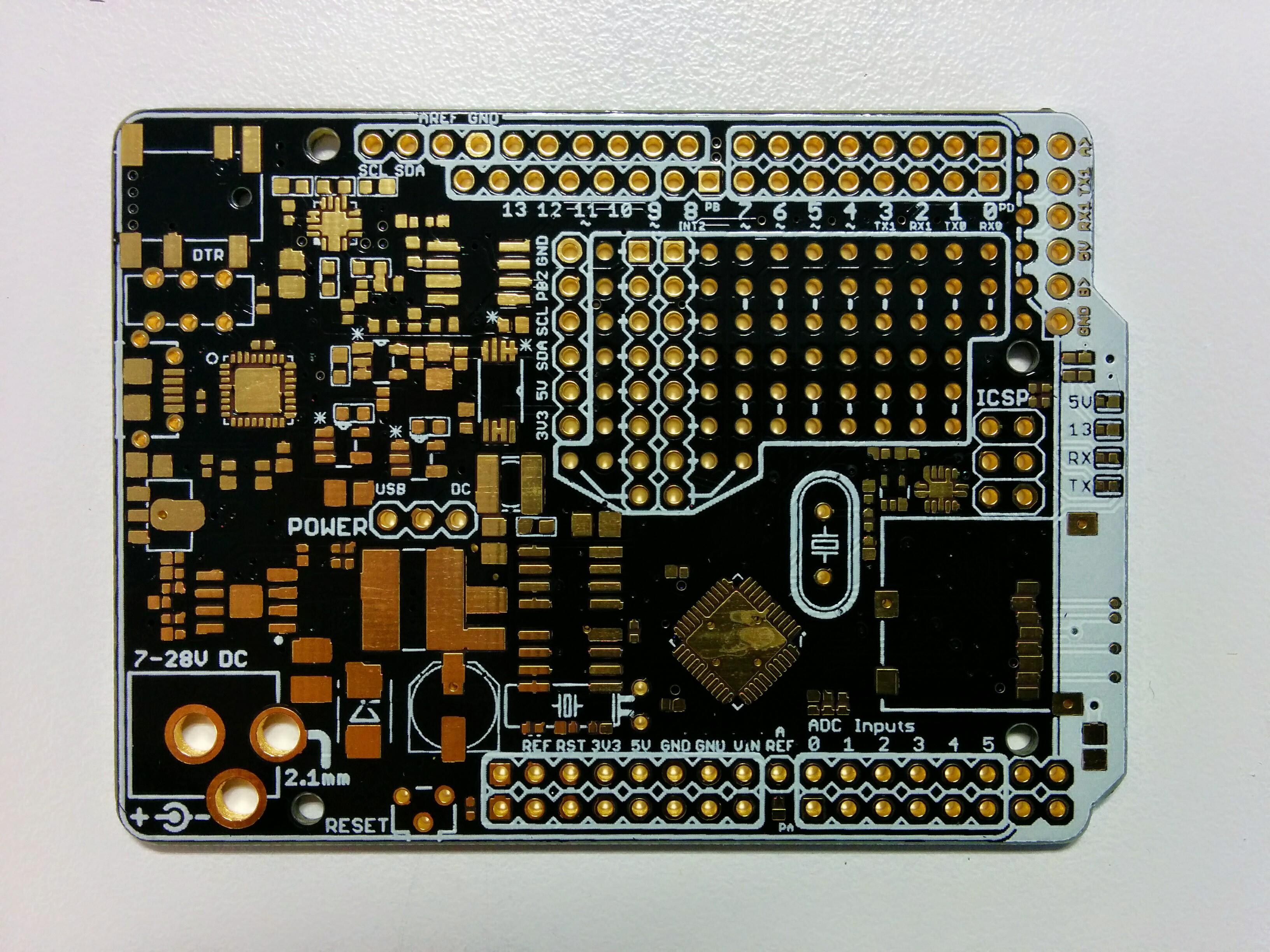
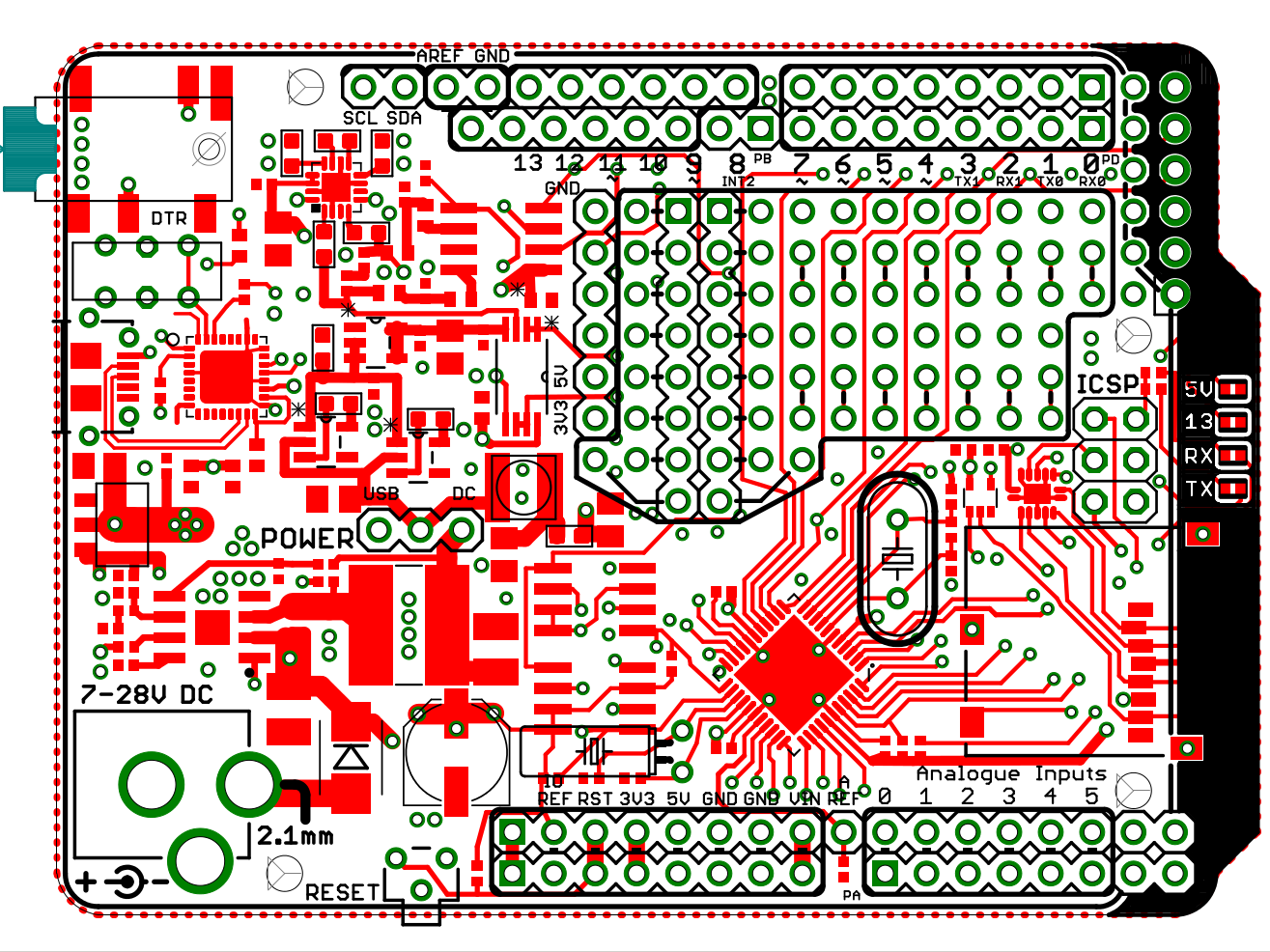
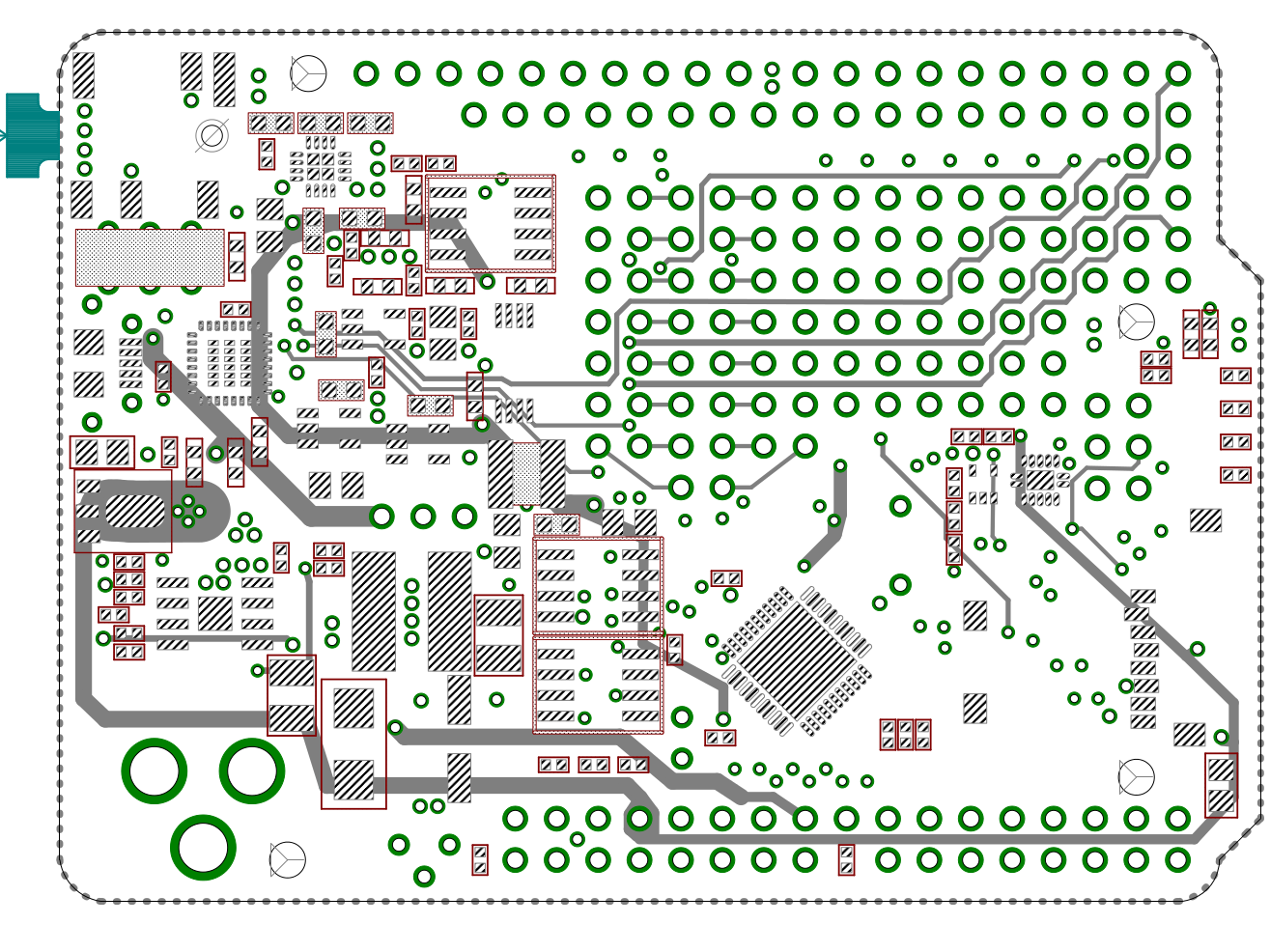
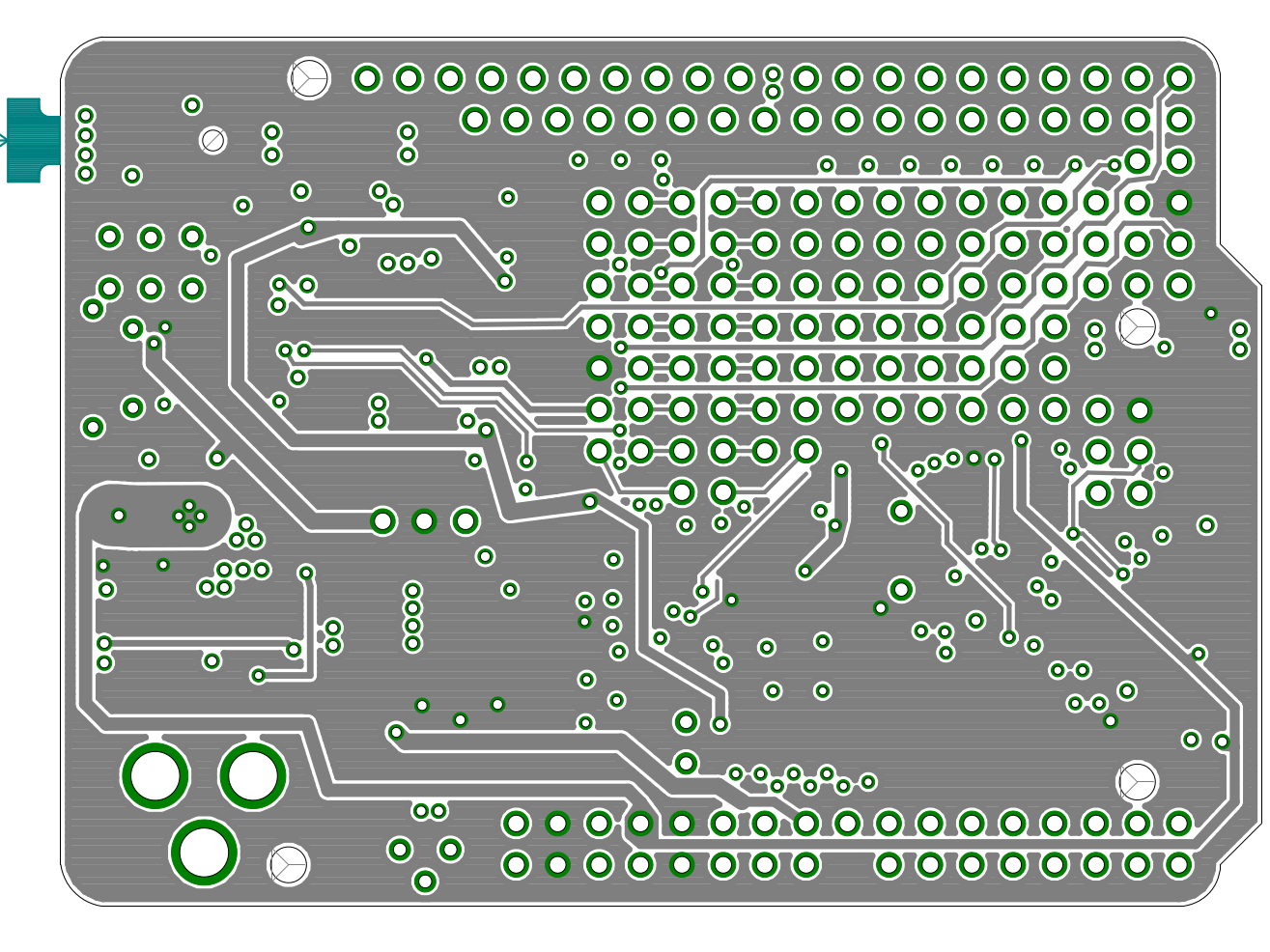
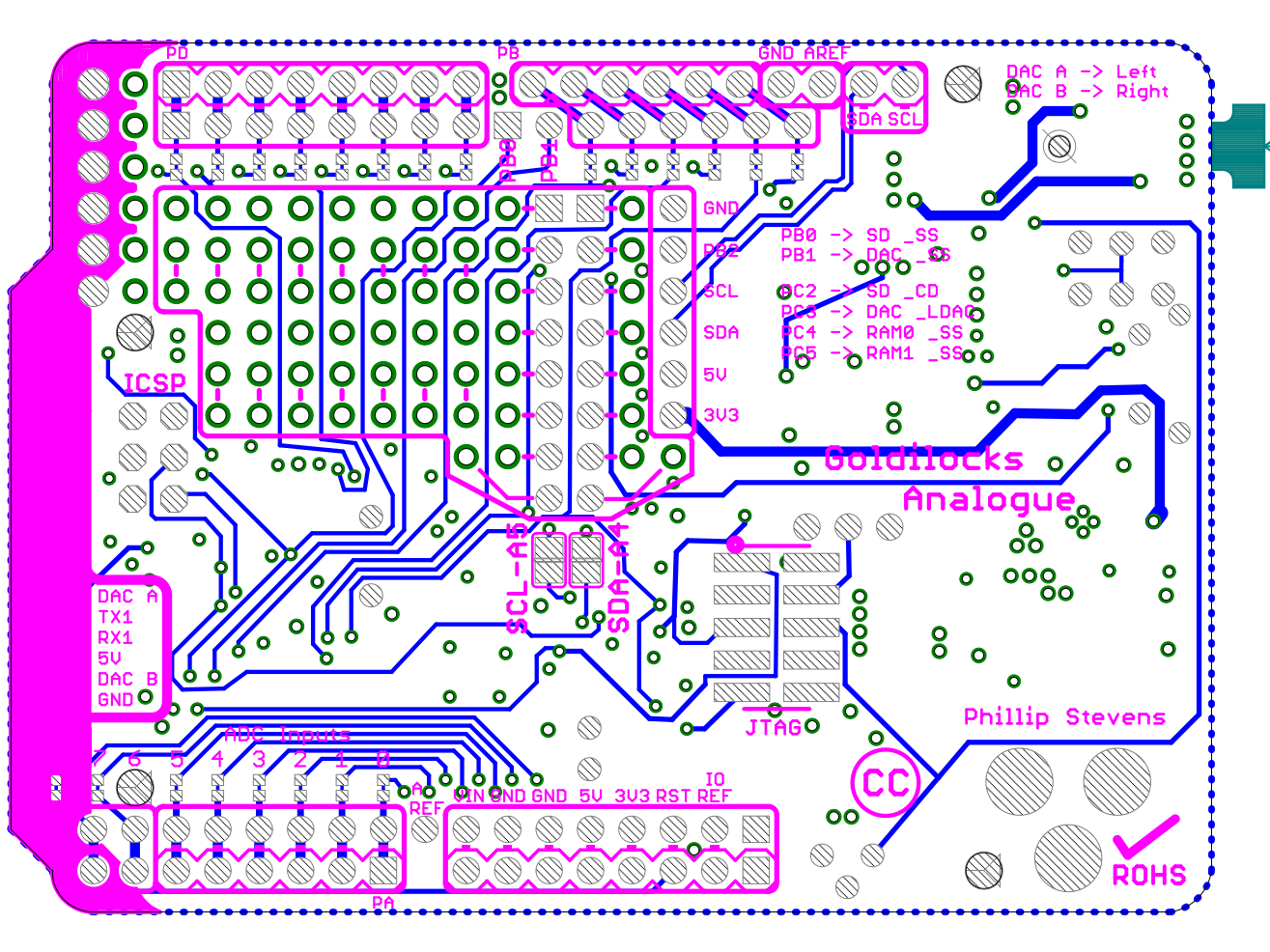
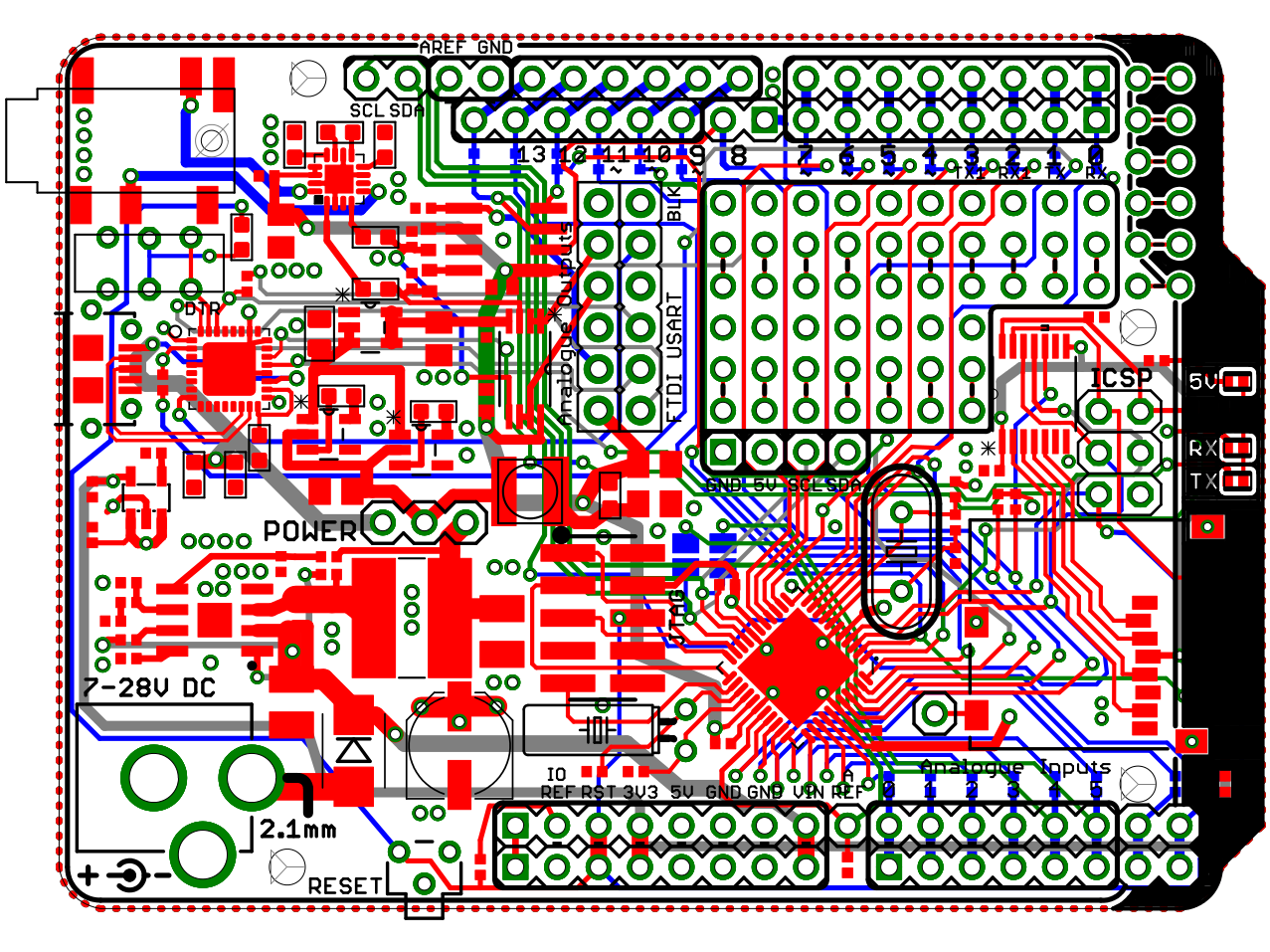
This is the front of the board showing all of the layers, and the general layout of the devices. The board layout is pretty busy, but still there is sufficient prototyping capability to take all the port pins off-board, or provide on-board breakouts.
Top Layer
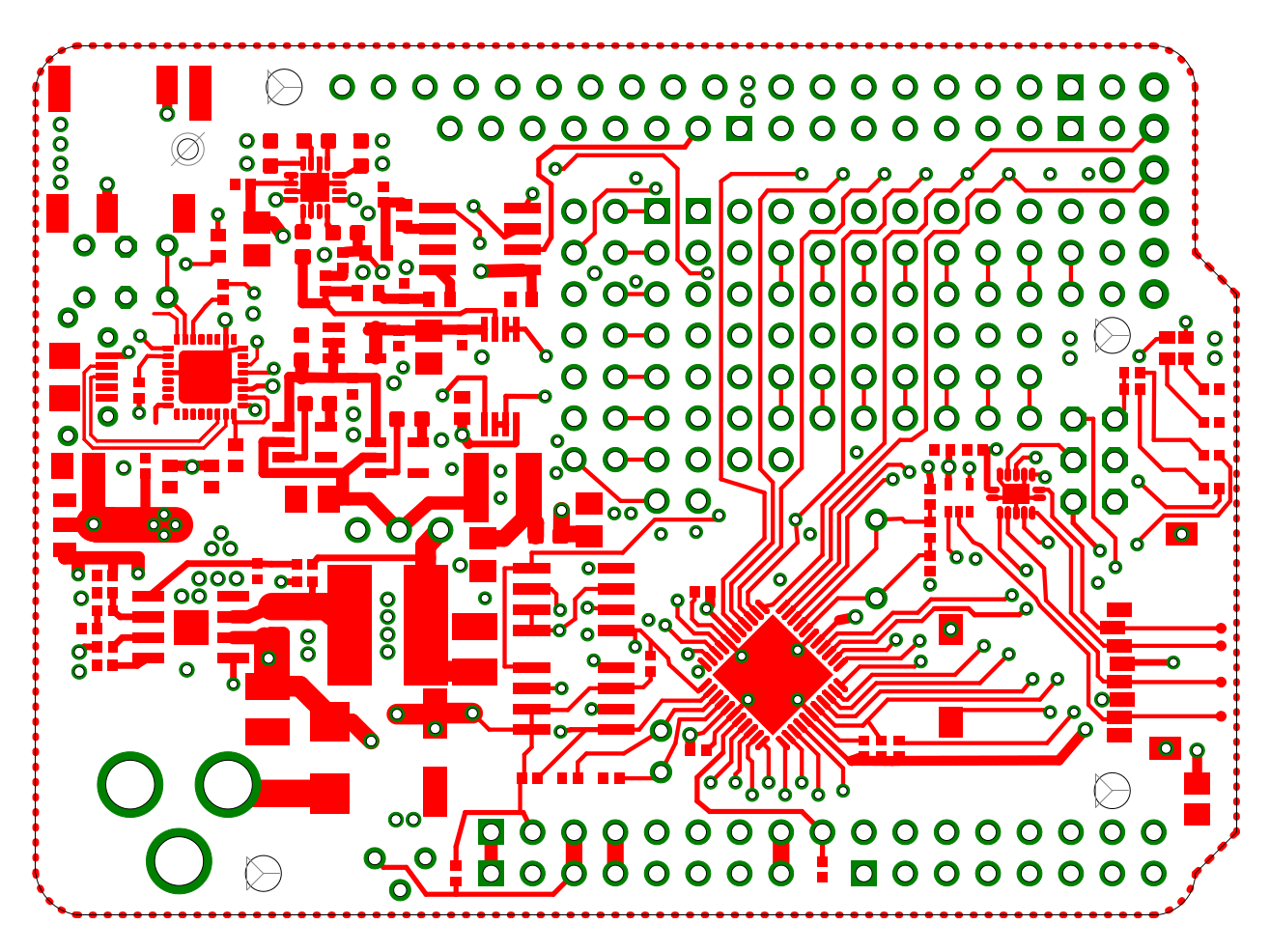
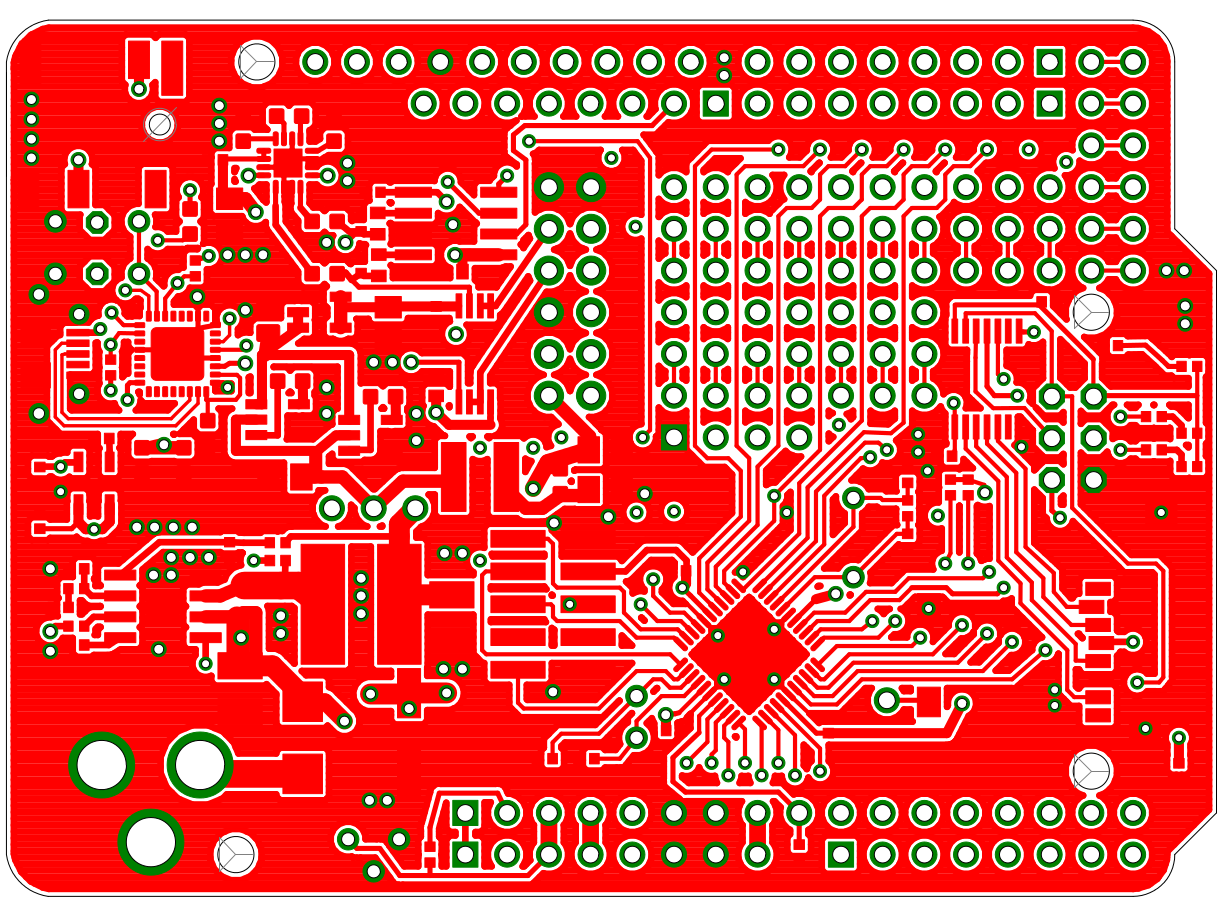
This is the Top Layer, which contains all of the devices. There are no devices on the Bottom Layer.
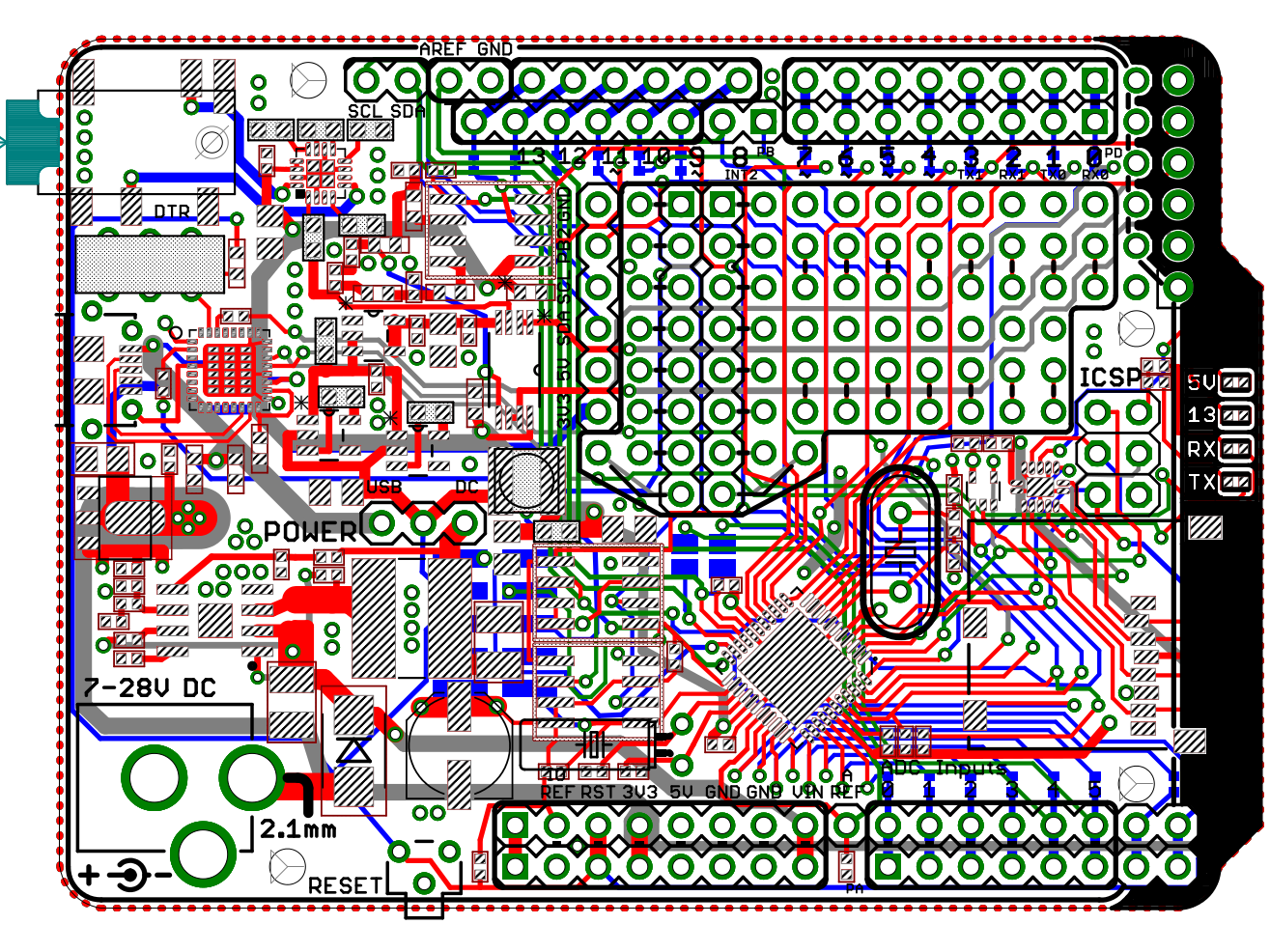
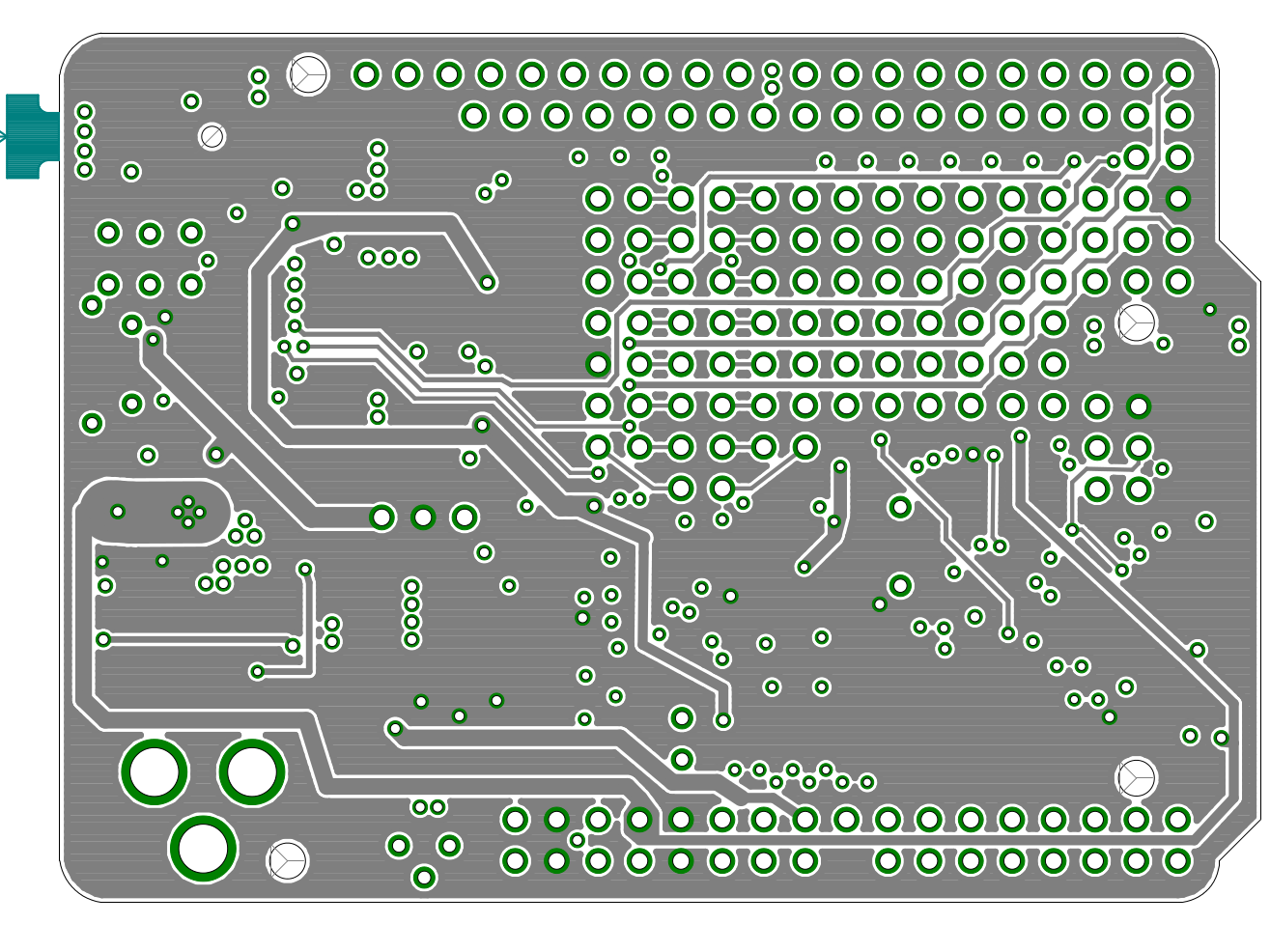
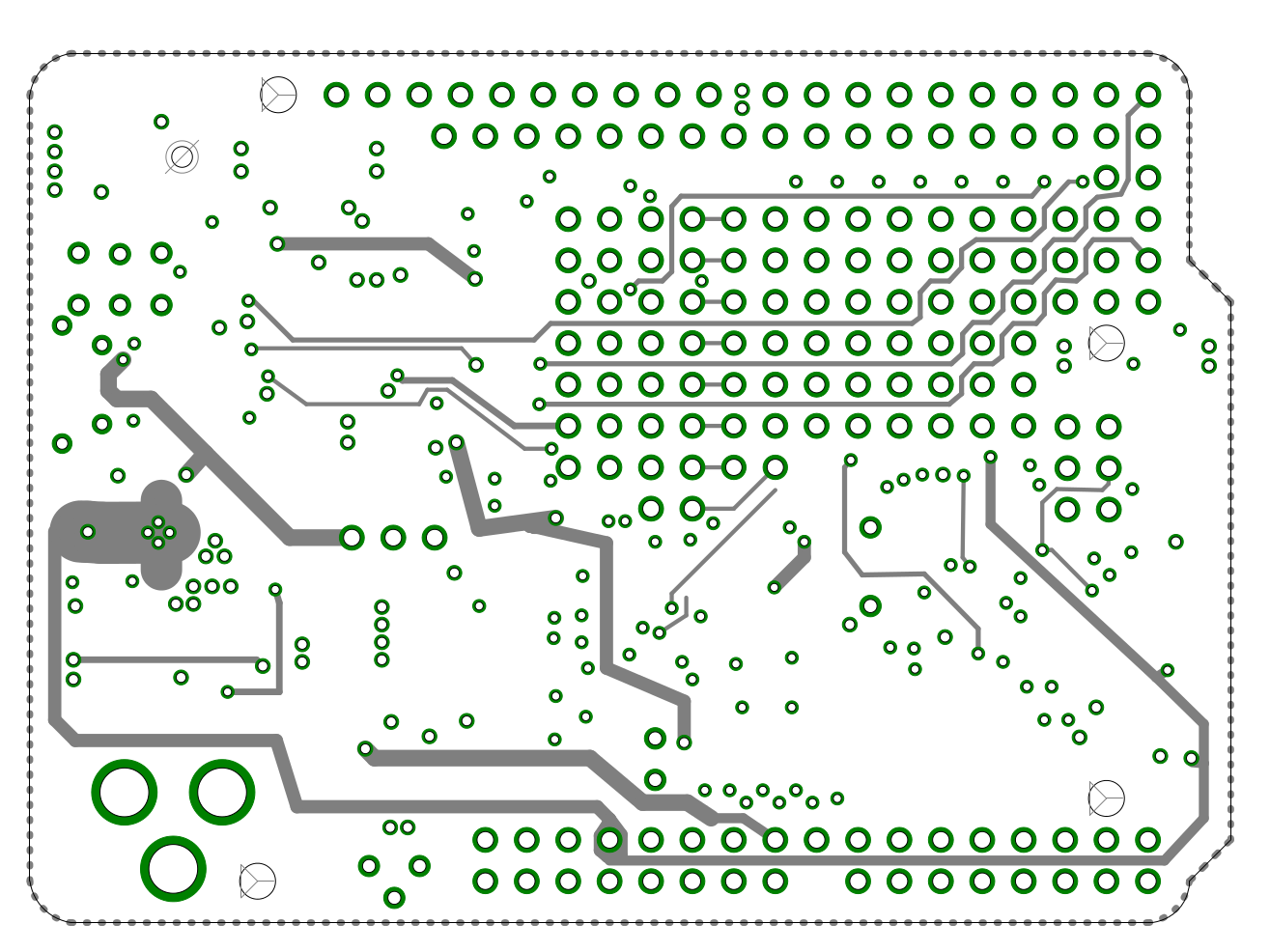
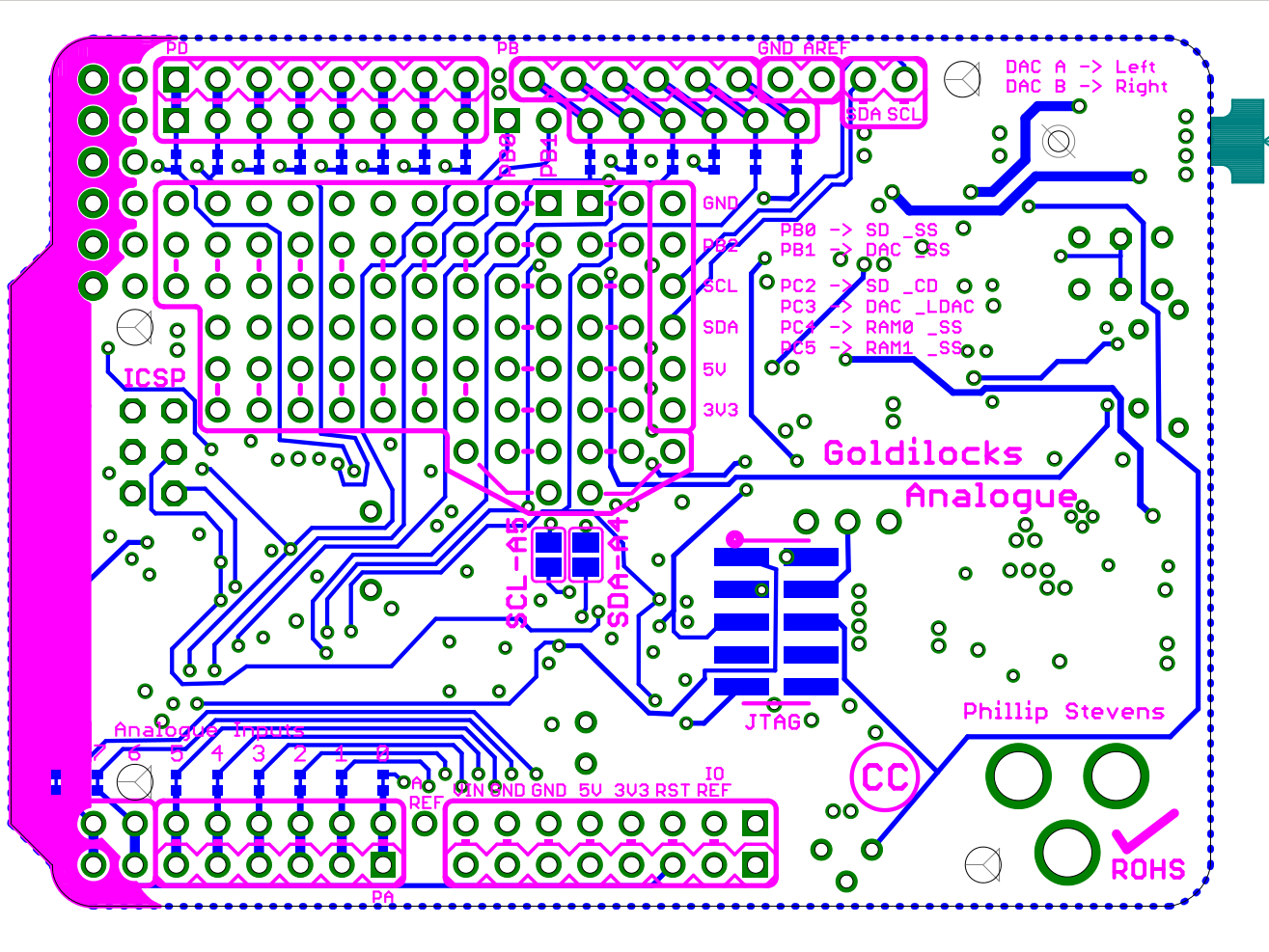
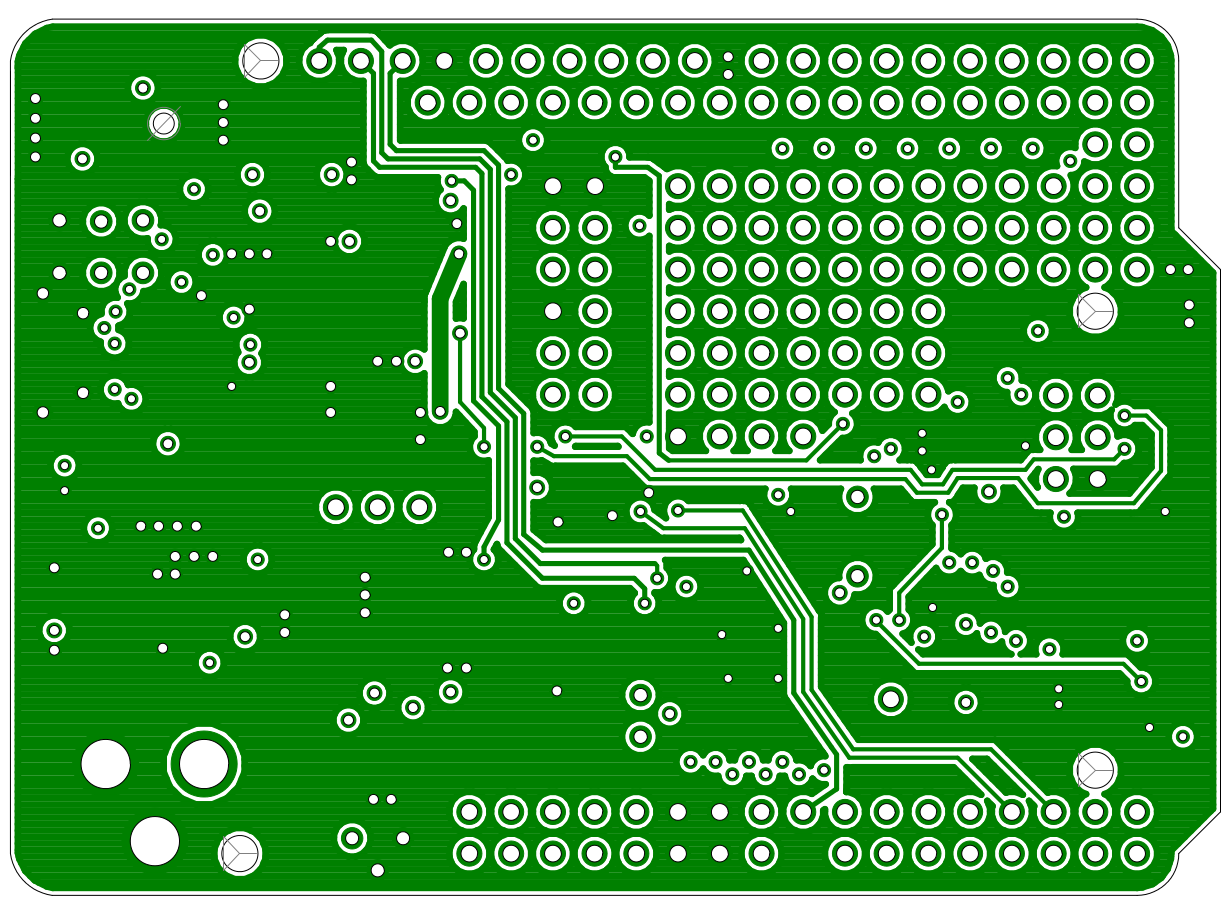
Route 2 (GND) Layer
The Ground Layer on Route 2 is unchanged from previous iterations, and provides a solid platform for low noise analogue circuits.
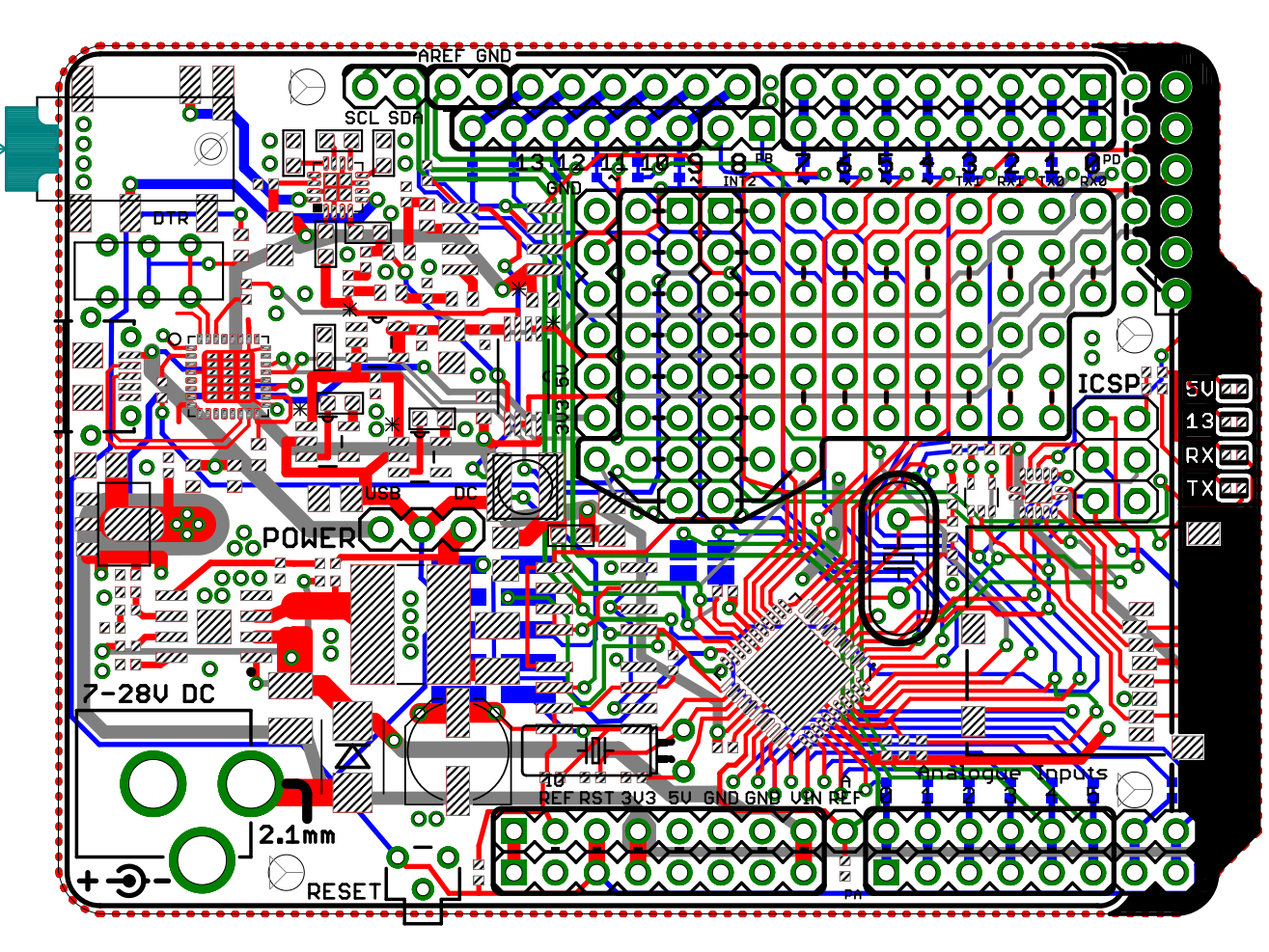
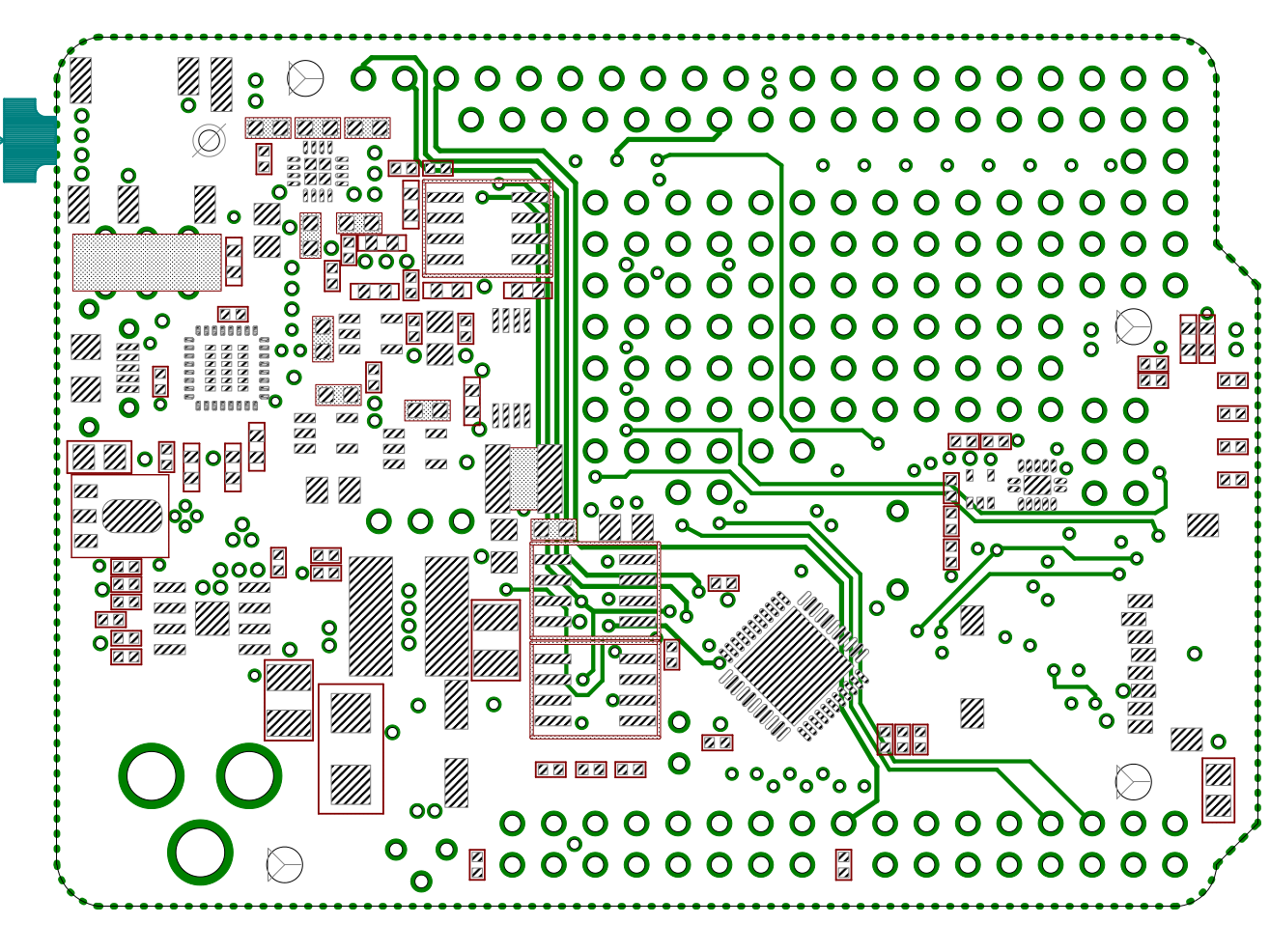
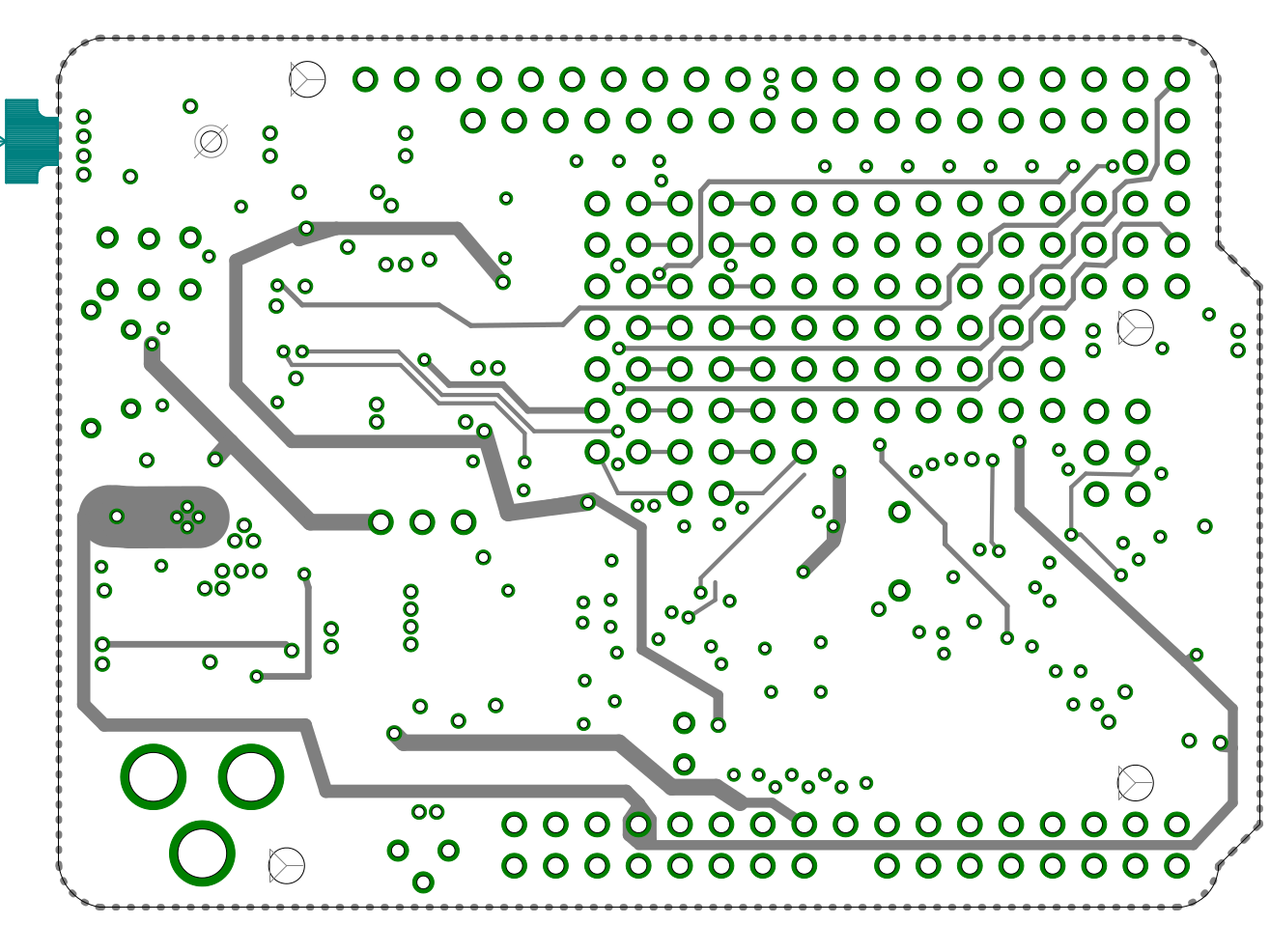
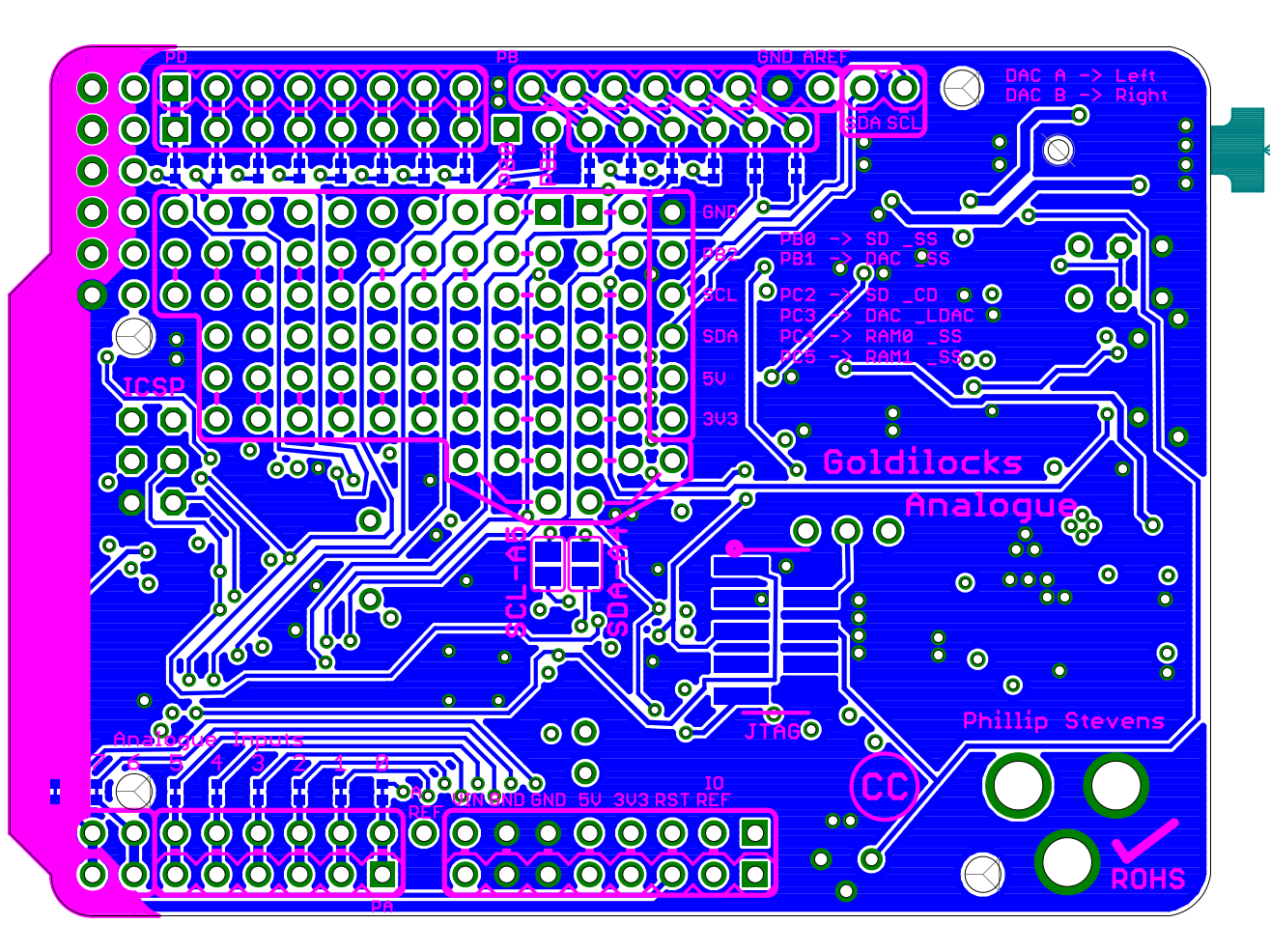
Route 15 (Vcc) Layer
The Route 15 power supply layer contains all of the supply lines, providing 5V regulated, 5V filtered for analogue AVcc, 3.3V regulated, and -3V regulated.
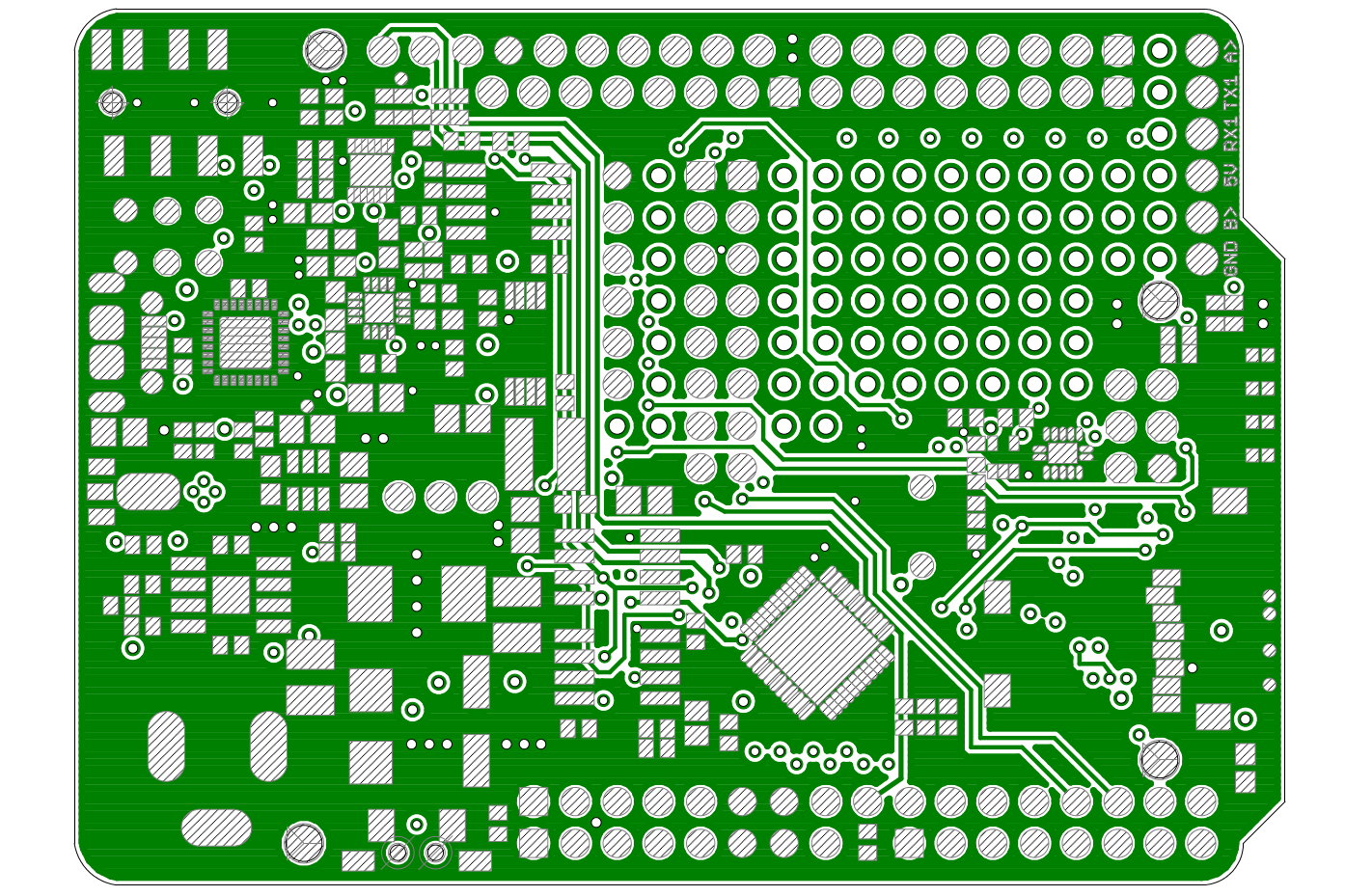
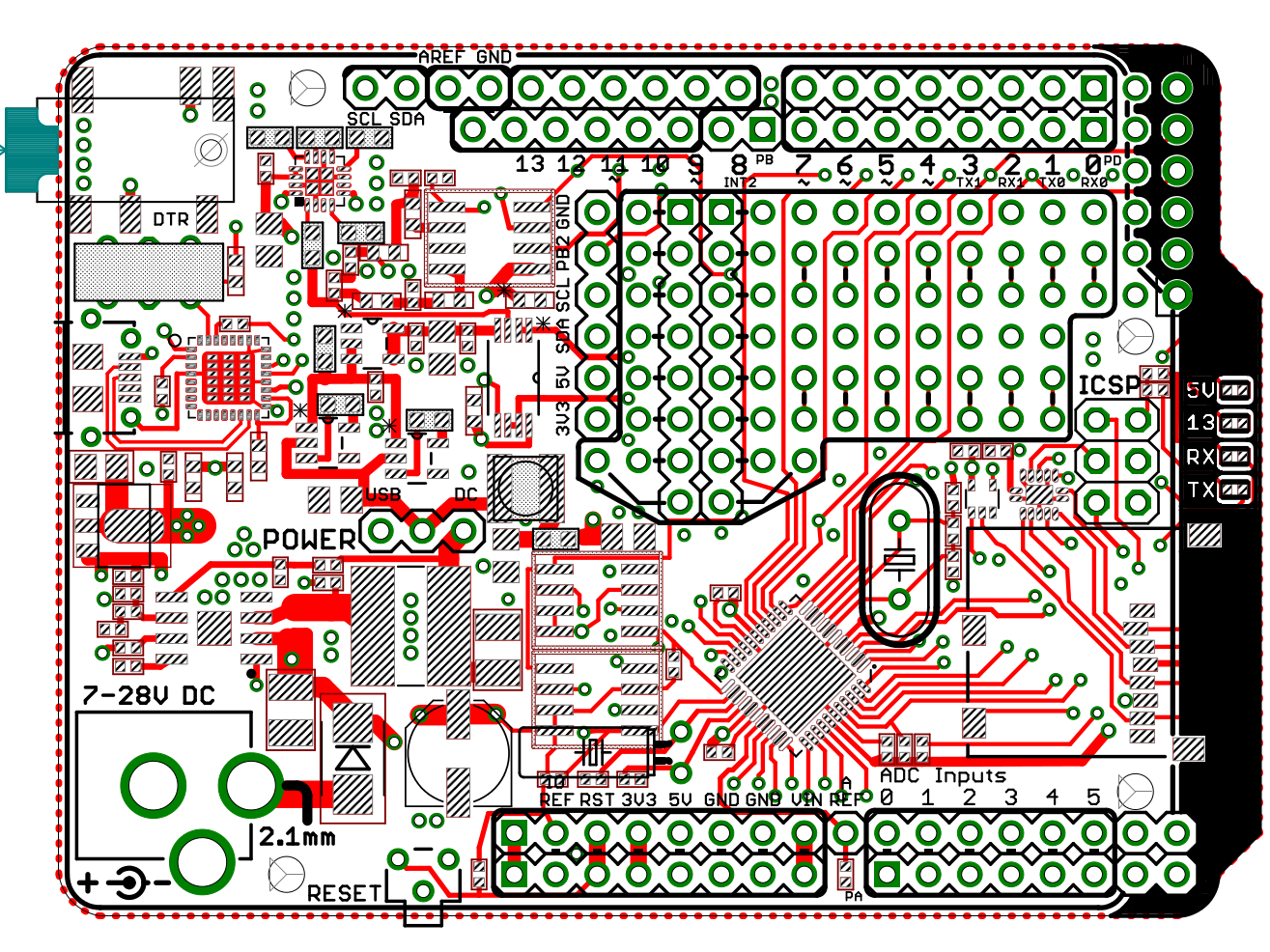
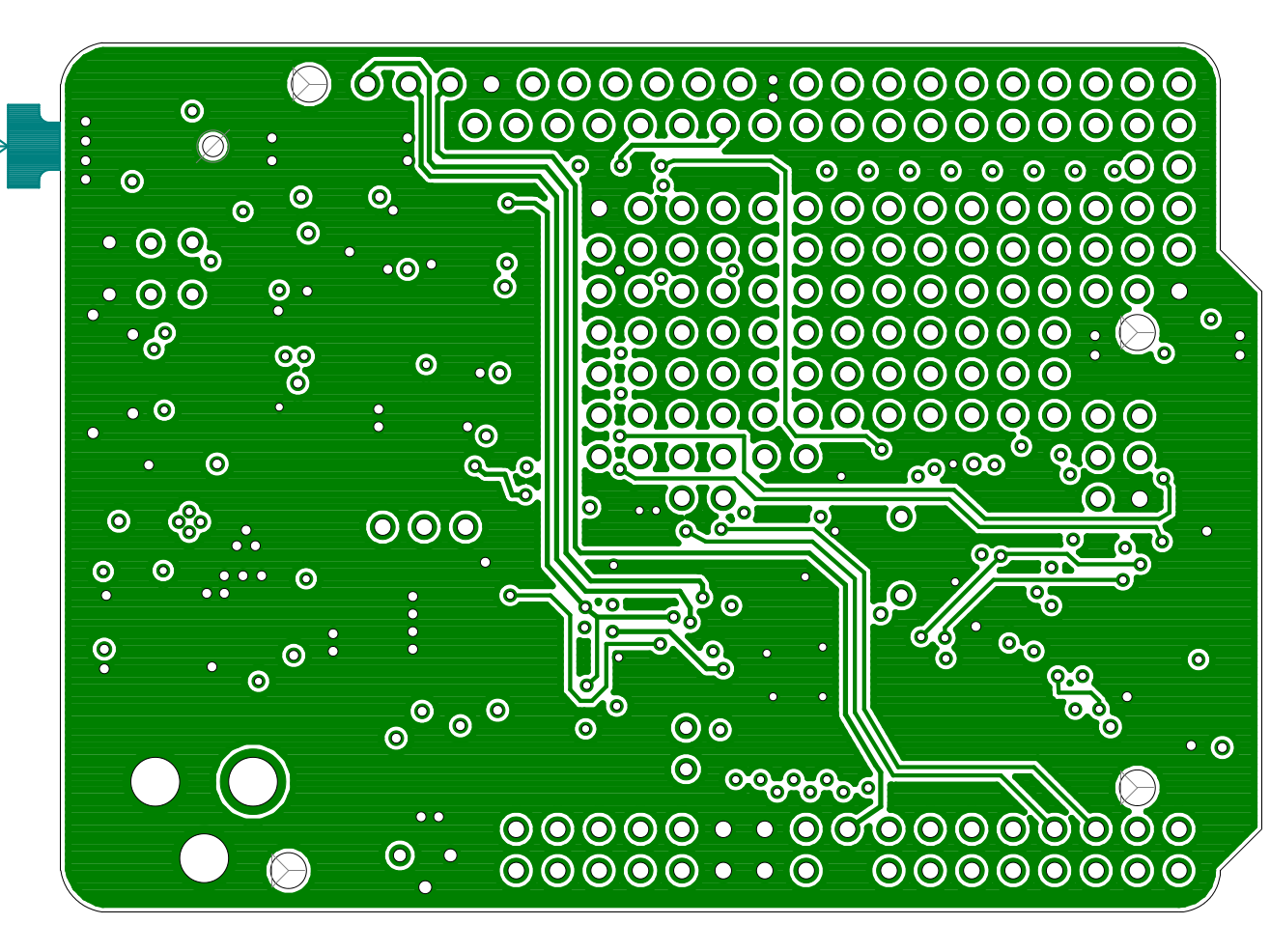
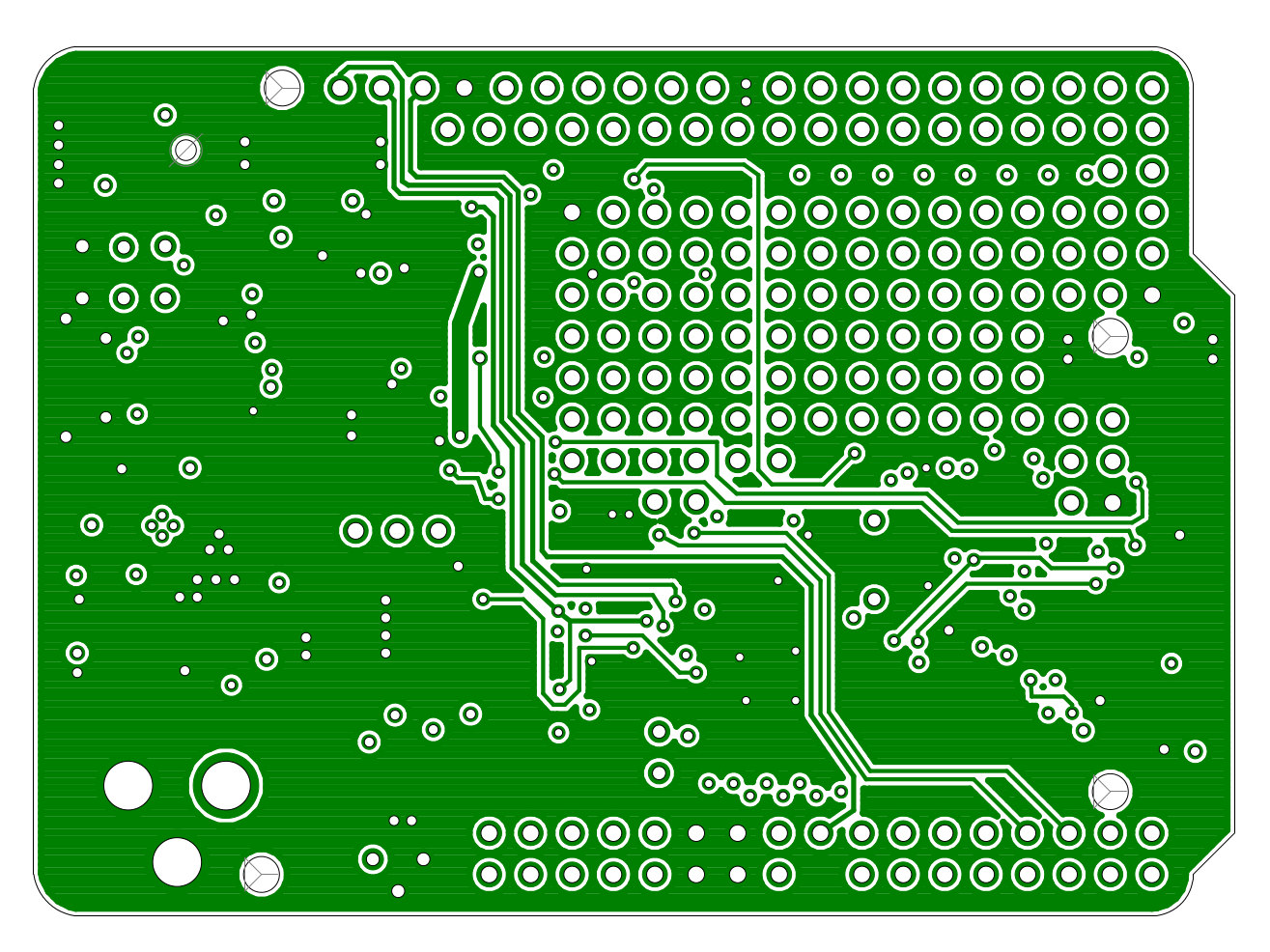
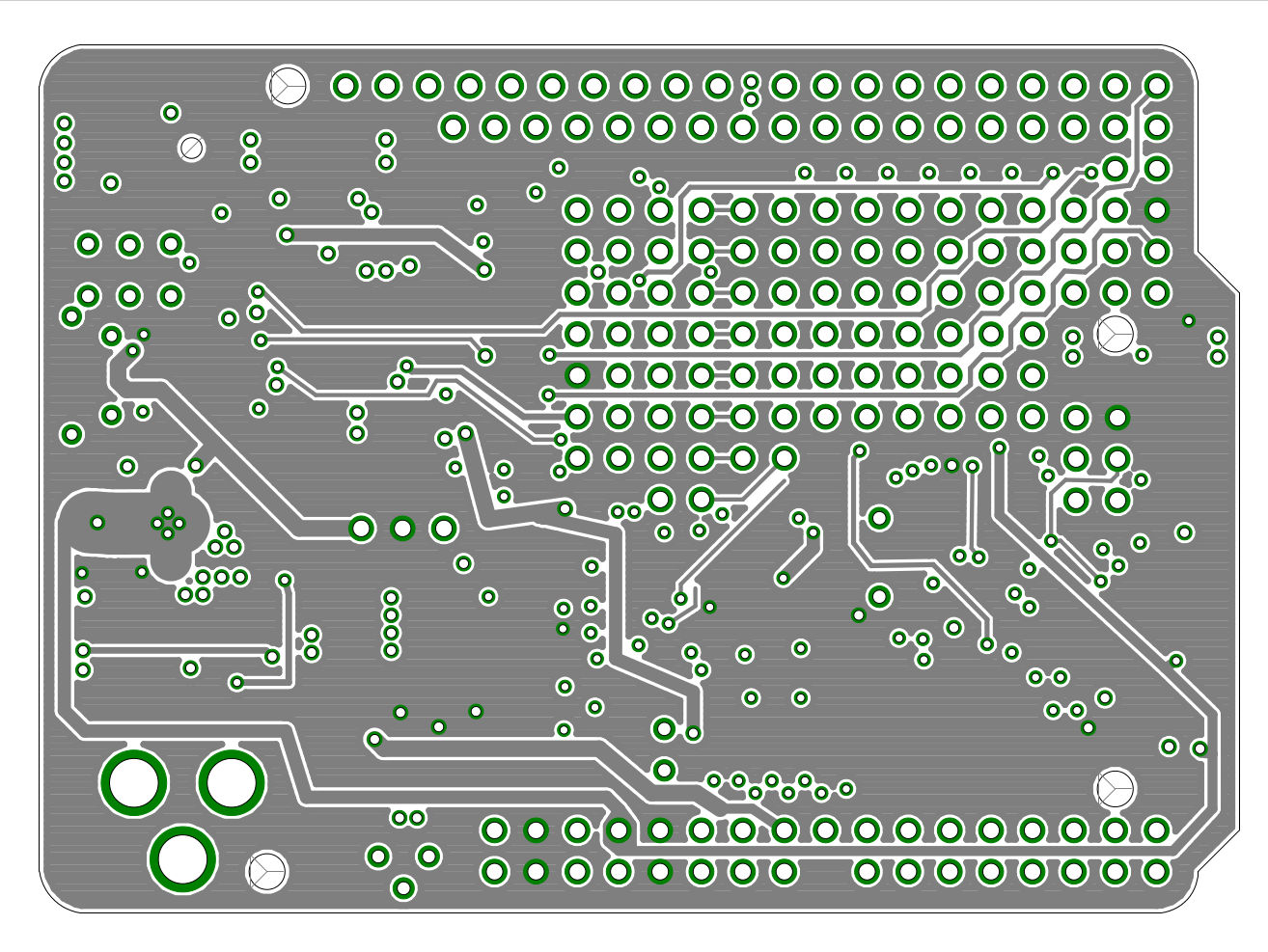
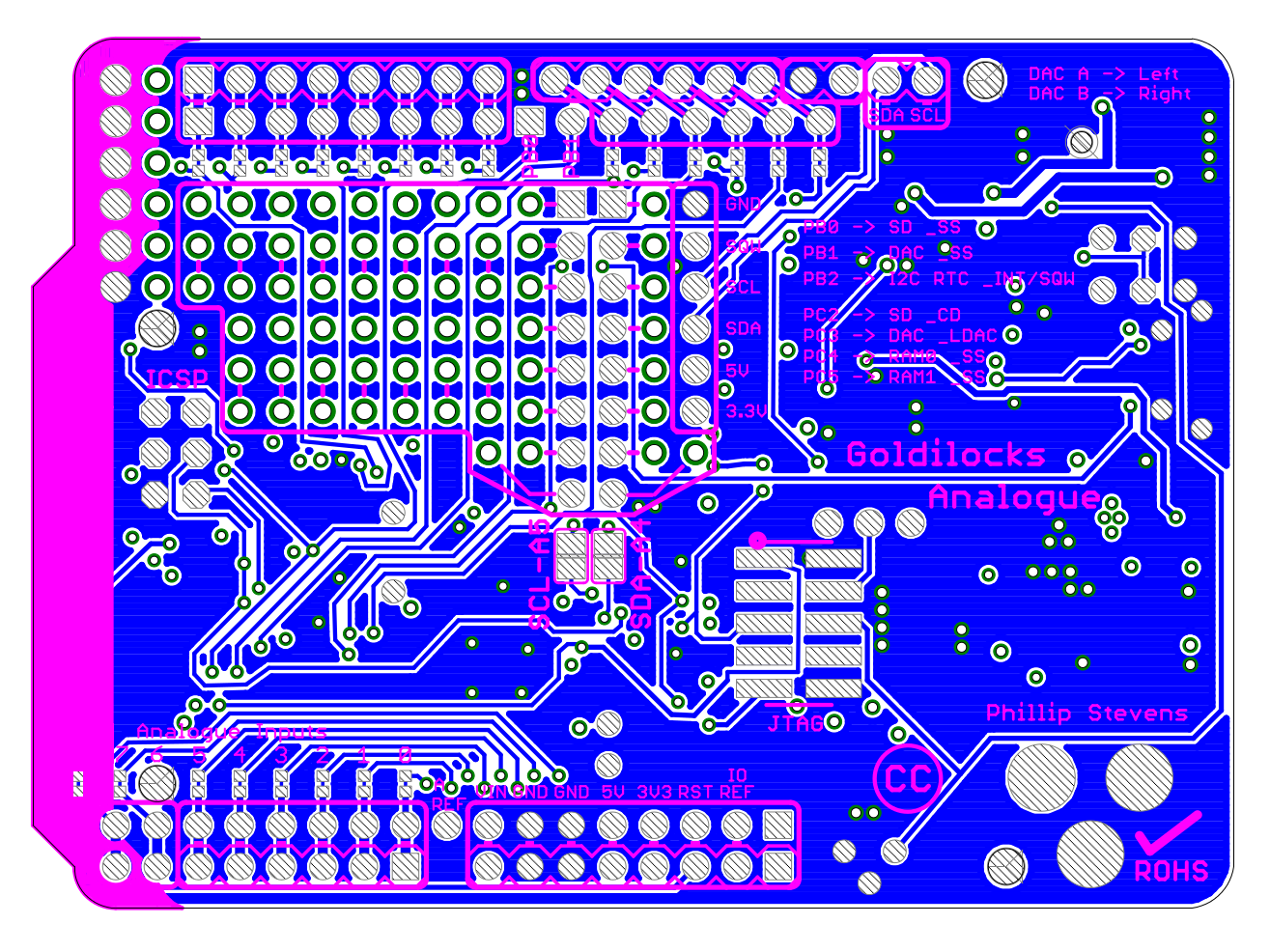
Bottom Layer
All the pin outs are defined on the Bottom Layer. In addition to the items previously mentioned, there are two small locations where the Line and Microphone inputs can be cut, and allow the full functionality of PA6 and PA7 to be recovered.
Pin Mapping
This the map of the ATmega1284p pins to the Arduino physical platform, and their usage on the Goldilocks Analogue
Some of the initial tests I’ve built include some 8 bit algorithmic music and, using two Goldilocks Analogue prototype devices, a digital walkie talkie using Xbee radios. They were fun, but don’t really demonstrate the full range of the audio capabilities of the platform.
Before randomly building something that made a bunch of squeaky sounds, I thought the best thing to do is to learn something about the field of analogue synthesizers and synthesizing audio.
I also obtained some simple analogue synthesizers from Korg to see exactly what they produce, so I could copy them. Some people write that this monotron analogue synthesizer family are good examples of a low cost musical instrument. I found it very interesting to examine the wave forms produced by the various settings.
Chained Korg monotron synths
Korg monotron DUO
Korg monotron DELAY
Using the features of the two Korg devices, I was able to define the goal for the synthesizer that I wanted to build using the Goldilocks Analogue.
The Korg monotron DUO has two voltage controlled oscillators (VCO1 and VCO2), which produce square waves. The VCO1 has a pitch setting, which defines the basic frequency at which the ribbon keyboard operates. The ribbon keyboard can be set to have a major scale, a minor scale, a full chromatic scale, or be a ribbon with no set notes. For clarity, the pitch on the DUO is analogue, so there is no guarantee that the notes generated by the ribbon keyboard will be in tune.
The VCO2 pitch can be modified either below or above the pitch of the VCO1. In its middle section, with some care, it can be matched exactly to the VCO1 setting. The switch allows either just the VCO1 or both VCO1 and VCO2 to produce sound. A separate XMOD intensity knob allows the VCO2 to modulate the frequency of the VCO1 oscillator, producing cross-modulation.
The monotron DUO contains the famous Korg MS-20 resonant low pass filter, which can be adjusted for both cut-off frequency and intensity of the resonant frequency. Setting the filter values allows the square wave noise generated by the two oscillators to be shaped into very interesting tones.
The Korg monotron DELAY is a very different device from the DUO. It has two oscillators, but only one at audio frequencies. The audio oscillator produces a saw-tooth wave at a frequency controlled by the ribbon keyboard. On the monotron DELAY there is no capability for playing specific notes as the keyboard is only available in ribbon mode. The second oscillator of the monotron DELAY is a low frequency oscillator (LFO), which can be adjusted from 1Hz up to about 30Hz. This LFO can produce either a triangle wave or a square wave to modulate the main audio oscillator. This is used mainly to apply vibrato to musical tones, or to produce very unusual tone ramps. The intensity and pitch of the LFO are controlled by knobs.
The Korg low pass filter present in the monotron DELAY is only adjustable for its cutoff frequency, so it is less flexible and interesting than the monotron DUO implementation.
The monotron DELAY is really built to showcase the analogue space delay functionality, which can be adjusted in both length of delay, and in intensity of feedback. With about 1 second of delay and 100% or more feedback possible, very short sequences of notes can be played and then built upon.
I’m not particularly musical, but I spent some very pleasant hours playing with the two Korg synthesizers experimenting with the sounds available from their very simple platforms, and used their capabilities to guide me in what to build into my Goldilocks Analogue synthesizer.
The next piece of research was to understand how to generate analogue wave forms using direct digital synthesis, and then how to modify sound of the wave forms using convolution or modulation in the time domain.
Design Specification
Having the two Korg devices as an inspiration, and reading about the original Moog synthesizer capabilities from the 1970’s, made the specification pretty straight forward.
The Goldilocks Analogue synthesizer has three oscillators, two of which operate at audio frequencies, being VCO1 and VCO2, and one low frequency oscillator, being LFO. The VCO1 is tuned in octaves at correct concert pitch, so that notes played would be at the right frequency. The VCO2 is pitched relative to the VCO1 pitch, and would range minus one octave to plus one octave (or half the VCO1 frequency to double the VCO1 frequency). The LFO is adjustable over the range from 1 Hz to 40 Hz.
I had decided to let each oscillator take one of two wave forms. For VCO1 I initially chose square wave, and saw tooth wave, to be able to replicate the exact sound of the Korg devices. I’ve since decided to move the saw tooth wave to the VCO2, and replaced it with a sine wave on VCO1. It is good to have the pure tone at the correct frequency for tuning instruments. An A4 from the Goldilocks Analogue Synthesizer will, for example, always be 440Hz.
For VCO2 I selected a triangle wave and a saw tooth wave. And, for the LFO there is a sine wave and a triangle wave available. I should point out that changing the wave form available to each oscillator is no more complicated that replacing the look-up table associated with the setting, and there is space available in the ATmega1284p to store at least another 4 separate wave form tables in flash memory, even without extending to on-board SPI EEPROM, or uSD storage.
In the mixing section the intensity or volume of each of VCO1 and VCO2 can be set. It is possible to turn off either oscillator. The intensity of the LFO effect is controlled too. The LFO modulates both the VCO1 and the VCO2. The final input is the cross modulation of VCO1 by the VCO2. Very interesting tonality is created by modulating VCO1 by pitches very close to its own frequency.
Each note is put through an exponential Attack and Release envelope, to give the note some shape. The mixed signal is then be sent to the voltage controlled filter. Using the current set up, the sample rate is 16,000 samples/second, which is enough to produce 6 octaves. The upper two octaves remain implemented, but are not reconstructed accurately. I have implemented a Biquad IIR filter to enable the output to be high, low, or band pass filtered. The default set up is for low pass filtering. The filter -3dB frequency, and the ringing levels can be adjusted for different musical effect.
Following the filter stage, the signal enters the space delay stage. The space delay stage can have only about half a second of delay, because of the RAM limitations (16kByte) of the ATmega1284p. So up to 6700 16 bit samples are supported by the space delay function. Samples are recovered from the delay buffer, and mixed with the new signals, then injected back into the delay loop. This creates an infinite loop of samples, depending on the amount of feedback set by the FEEDBACK control.
The final signal output level is controlled by a MASTER volume control. Additionally, an EEPROM STO and RCL capability for the settings has been implemented. Only the most recent settings are stored, which can be recalled when power is restored.
As the keyboard notes are generated using a look up table, multiple keyboard tuning options are possible. I have implemented Concert Tuning (A4 = 440Hz) and Equal Temperament (commonly used for pianos), and Verdi or Stradivari tuning (C4 = 256Hz) with Just Intonation Equal Fifths as an alternative. There is a toggle to chose between either these two options. Any tuning can be generated, and then loaded as the note table.
GUI Implementation
The GUI of the solution depends on a Gameduino 2 screen, which is based on the FTDI Chip FT800 EVE GPU device. The FT800 was the first EVE GPU available from FTDI and it can only support single touch. This limitation makes it only partially useful as a product to support this application. The most interesting sounds are generated by bending the controls whilst playing the notes. Fortunately there are newer EVE GPU devices that support multi-touch and they would make a better platform if this synthesizer were to become more than just a demonstration.
The GUI makes extensive use of FT800 co-processor widget capabilities being dials, toggles, keys, and text. Some examples below.
The integrated touch tracking capability makes it very easy to parse touch into specific commands.
readTag = FT_GPU_HAL_Rd8(phost, REG_TOUCH_TAG);
if (readTag > 0x80)// tag is greater than 0x80 and therefore is a dial.
{
TrackRegisterVal.u32 = FT_GPU_HAL_Rd32(phost, REG_TRACKER);
switch (TrackRegisterVal.touch.tag)
{
case (VCO1_PITCH):
synth.vco1.pitch = TrackRegisterVal.touch.value & 0xe000;
break;
// continues...
}
This integrated touch tracking capability can return which dial (slider / scroll bar) has been touched, and the relative position of the touch. This same position value can then be used in the display command to set the position of the dial (slider / scroll bar), providing direct feedback on the GUI.
The main GUI task simply calls the touch function, and if there is a touch recorded the GUI is updated, and the revised settings entered into the analogue audio control structure. Otherwise if there are no touches recorded there are no processor cycles wasted updating the display. The FT800 EVE GPU continues to display the same content until a new display list is loaded into the GPU memory.
When a keyboard touch is recorded, the tone generation information is updated, and this then directly impacts the output tone generated by the audio section.
// setting the phase increment for VCO1 is frequency * LUT size / sample rate.
// << 1 in SAMPLE_RATE is residual scale to create 24.8 fixed point number.
// The LUT is already pre-scaled << 7 in the calculation.
// The LUT can't be pre-scaled to << 8 because this creates numbers too large for uint32_t to hold,
// and we want to allow the option to vary the SAMPLE_RATE at compilation time, so it has to stay in the calculation.
synth.vco1.phase_increment = (uint32_t)pgm_read_dword(synth.note_table_ptr + stop * NOTES + note) / (SAMPLE_RATE >> 1);
// set the VCO2 phase increment to be -1 octave to +1 octave from VCO1, with centre dial frequency identical.
if (synth.vco2.pitch & 0x8000) // upper half dial
synth.vco2.phase_increment = ((synth.vco1.phase_increment >> 4) * synth.vco2.pitch ) >> 11;
else // lower half dial
synth.vco2.phase_increment = (synth.vco1.phase_increment >> 1) + (((synth.vco1.phase_increment >> 4) * synth.vco2.pitch) >> 12);
// set the LFO phase increment to be from 0 Hz to 32 Hz.
synth.lfo.phase_increment = ((uint32_t)synth.lfo.pitch * LUT_SIZE / ((uint32_t)SAMPLE_RATE << 4) );
The phase increment desired, respective to the relevant tone desired, is read from a look up table containing 8 octaves each of 12 notes for VCO1. VCO2 phase increment is then set as a proportion of VCO1. And LFO phase increment is set to range from 0 to around 30 Hz. With this information, and the selected wave form look up table, the audio implementation can do its thing.
Audio Implementation
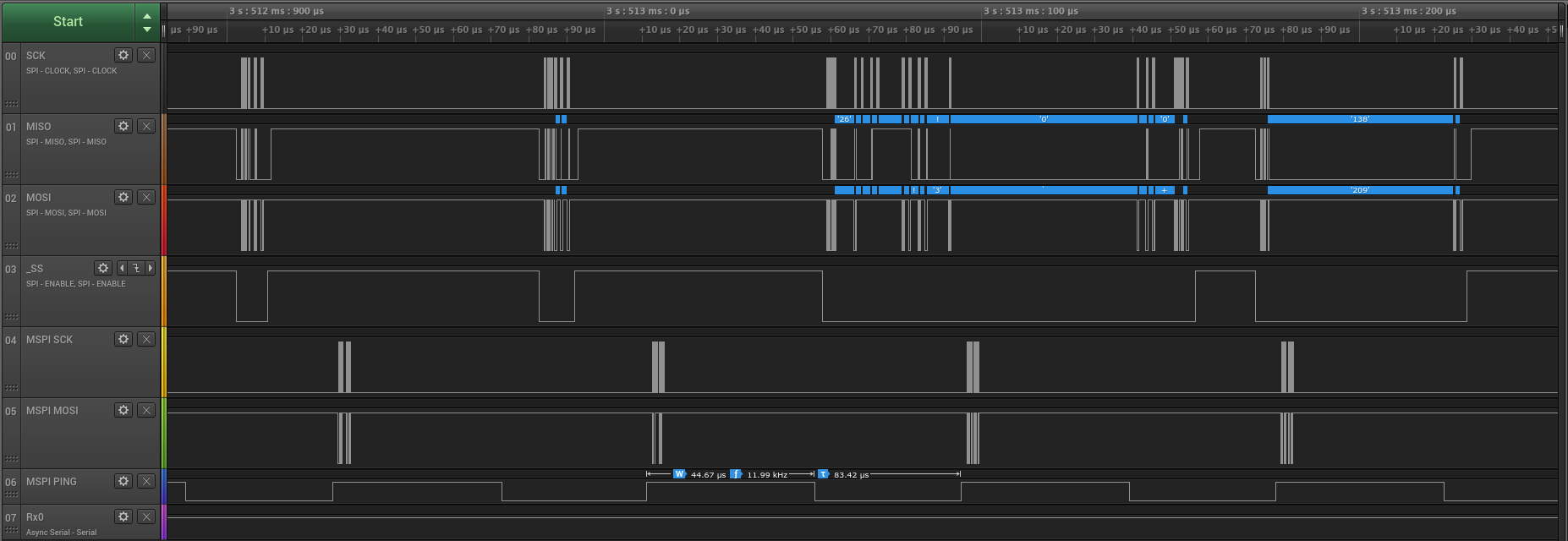
The synthesizer audio section is implemented in one function, that is executed each time a new sample is generated. This means at 12,000 samples/ second sample generation frequency, we have 83 micro seconds to generate the final sample to be pushed to the Goldilocks Analogue MCP4822 12 bit dual channel DAC.
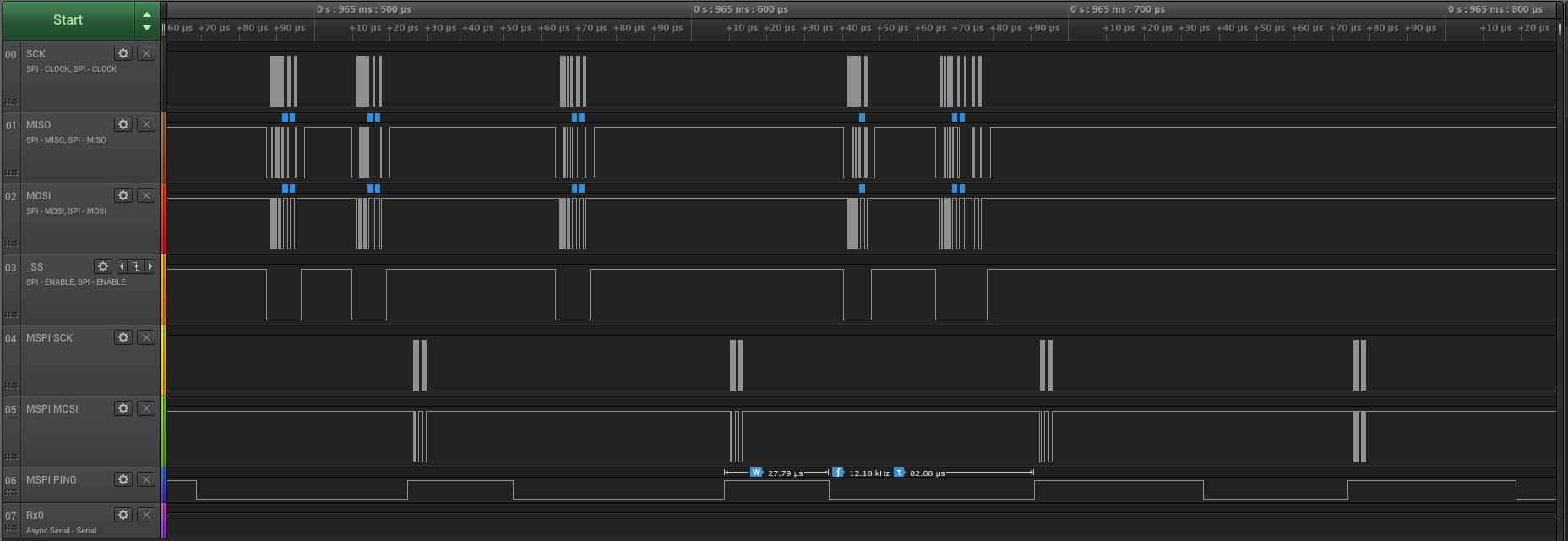
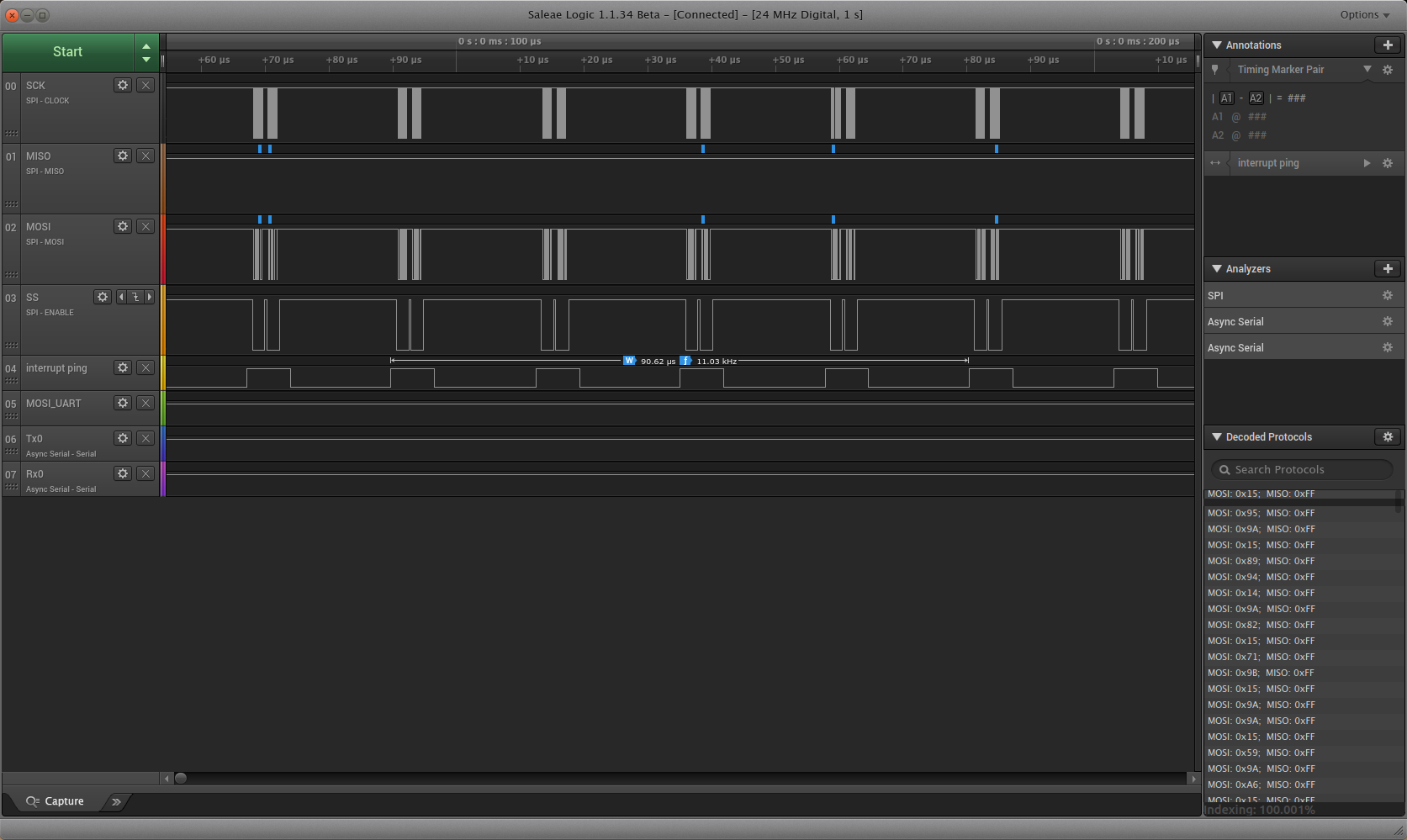
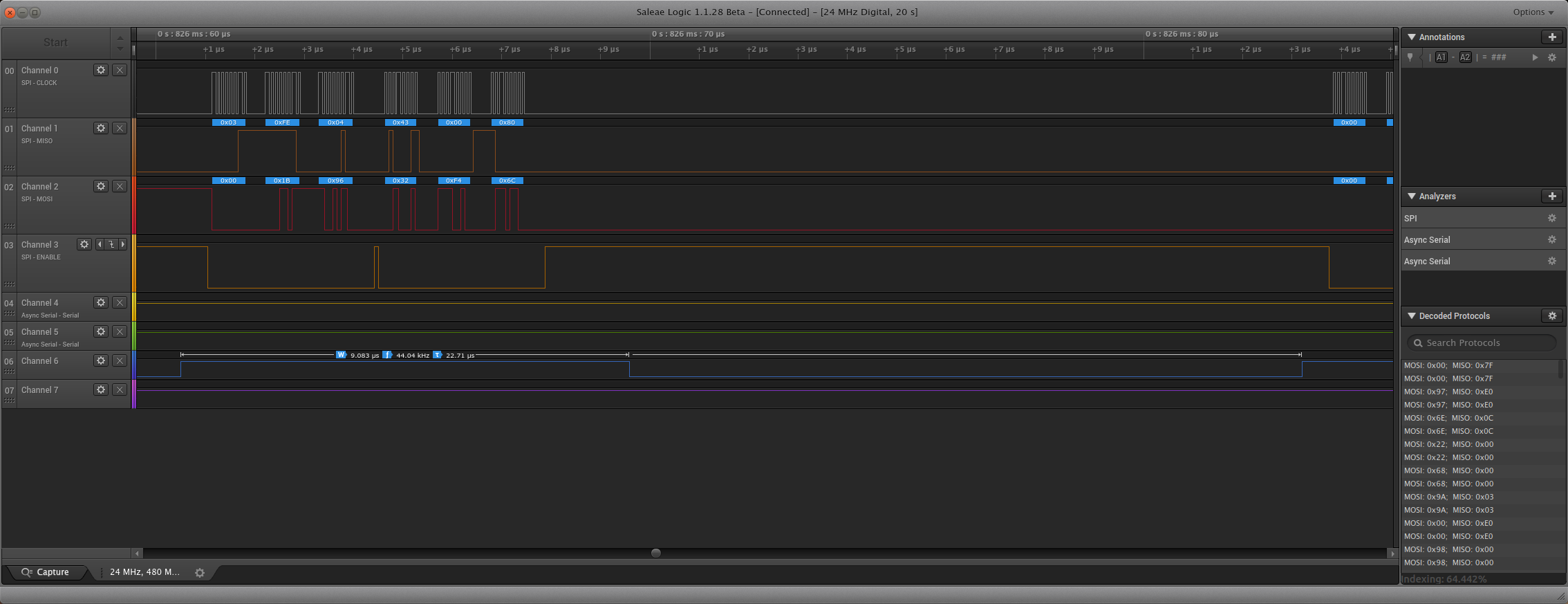
The current sample generation routine takes under 45 micro seconds to complete with 3 Oscillators running, so there is a little head room still available. With some further coding improvements it was possible to raise the sample frequency to 16,000 samples/sec as the sample generation frequency. The below logic trace shows the main SPI interface (SCK, MISO, MOSI, _SS) delivering commands to the EVE GPU, and the lower MSPI interface (MSPI SCK, MSPI MOSI, MSPI PING) providing the calculated samples, every 83 micro seconds, to the DAC.
Goldilocks Analogue Synthesizer, with 3 Oscillators operating.
It is clear to see that two EVE GPU transactions are being interrupted by the DAC output, but because the main SPI interface is not changing state the transaction is faultlessly resumed once the DAC interrupt is completed.
In contrast, when there are no oscillators running because no key is pressed, the sample generation routine takes just 28 micro seconds to complete. The logic trace below shows the change of state from 0 to 3 oscillators.
Goldilocks Analogue, with no Oscillators operating.
There is little time available to calculate sample values in real time, so all of the samples are pre-calculated and are stored in look-up tables (LUT). Each LUT contains 4096 16 bit samples, which gives 12 significant bits of accuracy for the values. I chose 4096 samples because the ATmega1284p has sufficient storage to support multiple tables of this size in its flash memory. Smaller LUTs would sacrifice accuracy, and larger LUTs would compromise on the number of available wave forms.
I have prepared LUTs for sine wave, square wave, triangle wave, and saw tooth wave options. Another advantage of the LUT approach is that better bandwidth optimised LUT values can be substituted without changing the code. Also, LUTs allow completely arbitrary waveforms could be used if desired to obtain specific timbre or nuances of sound.
The sample generation code starts with the LFO oscillator using a direct digital synthesis model. Each oscillator sample is calculated identically by stepping through the LUT with a phase increment based on the frequency of the note required, but VCO2 phase increment is modified by the LFO output and the VCO1 phase increment is modified by both VCO2 and LFO outputs.
Code shown here assumes that both LFO and VCO2 output wave forms have already been calculated.
///////////// Now do the VCO1 ////////////////////
// This will be modulated by the VCO2 value (depending on the XMOD intensity),
// and the LFO intensity.
if( synth.vco1.toggle )
{
// Increment the phase (index into waveform LUT) by the calculated phase increment.
// Both the phase and phase_increment are stored as 24.8 in uint32_t.
// The fractional component of the phase and phase_increment is needed to ensure the wave
// is tracked accurately.
synth.vco1.phase += synth.vco1.phase_increment;
// calculate how much the LFO affects the VCO1 phase increment
if (synth.lfo.toggle)
{
// increment the phase (index into LUT) by the calculated phase increment including the LFO output.
synth.vco1.phase += (uint32_t)outLFO; // increment on the fractional component 8.8, limiting the effect.
}
// calculate how much the VCO2 XMOD affects the VCO1 phase increment
if (synth.vco2.toggle)
{
// increment the phase (index into LUT) by the calculated phase increment including the LFO output.
synth.vco1.phase += (uint32_t)outXMOD; // increment on the fractional component 8.8, limiting the effect.
}
// if we've gone over the waveform LUT boundary -> loop back
synth.vco1.phase &= 0x000fffff; // this is a faster way doing the table
// wrap around, which is possible
// because our table is a multiple of 2^n.
// Remember the lowest byte (0xff) is fractions of LUT steps.
// The table is 0xfff.ff bytes long.
currentPhase = (uint16_t)(synth.vco1.phase >> 8); // remove the fractional phase component.
// get first sample from the defined LUT for VCO1 and store it in temp1
temp1 = pgm_read_word(synth.vco1.wave_table_ptr + currentPhase);
++currentPhase; // go to next sample
currentPhase &= 0x0fff; // check if we've gone over the boundary.
// we can do this because it is a multiple of 2^n.
// get second sample from the LUT for VCO1 and put it in temp2
temp2 = pgm_read_word(synth.vco1.wave_table_ptr + currentPhase);
// interpolate between samples
// multiply each sample by the fractional distance
// to the actual location value
frac = (uint8_t)(synth.vco1.phase & 0x000000ff); // fetch the lower 8bits
// the optimised assembly code Multiply routines come from Open Music Labs.
MultiSU16X8toH16Round(temp3, temp2, frac);
// scaled sample 2 is now in temp3, and since we are done with
// temp2, we can reuse it for the next result
MultiSU16X8toH16Round(temp2, temp1, 0xff - frac);
// temp2 now has the scaled sample 1
temp2 += temp3; // add samples together to get an average
// our resultant wave is now in temp2
// set amplitude with volume
// multiply our wave by the volume value
MultiSU16X16toH16Round(outVCO1, temp2, synth.vco1.volume);
// our VCO1 wave is now in outVCO1
}
The next piece of the audio process is to mix the two oscillators VCO1 and VCO2, and then calculate the space delay required. This is where the resonant low pass filter is implemented.
////////////// mix the two oscillators //////////////////
// irrespective of whether a note is playing or not.
// combine the outputs
temp1 = (outVCO1 >> 1) + (outVCO2 >> 1);
///////// Resonant Low Pass Filter here ///////////////
IIRFilter( &filter, &temp1);
///////// Do the space delay function ///////////////////
// Get the number of buffer items we have, which is the delay.
MultiU16X16toH16Round( buffCount, (uint16_t)(sizeof(int16_t) * DELAY_BUFFER), synth.delay_time);
// Get a sample back from the delay buffer, some time later,
if( ringBuffer_GetCount(&delayBuffer) >= buffCount )
{
temp0.u8[1] = ringBuffer_Pop(&delayBuffer);
temp0.u8[0] = ringBuffer_Pop(&delayBuffer);
}
else // or else wait until we have samples available.
{
temp0.i16 = 0;
}
if (synth.delay_time) // If the delay time is set to be non zero,
{
// do the space delay function, irrespective of whether a note is playing or not,
// and combine the output sample with the delayed sample.
temp1 += temp0.i16;
// multiply our sample by the feedback value
MultiSU16X16toH16Round(temp0.i16, temp1, synth.delay_feedback);
}
else
ringBuffer_Flush(&delayBuffer); // otherwise flush the buffer if the delay is set to zero.
// and push it into the delay buffer if buffer space is available
if( ringBuffer_GetCount(&delayBuffer) <= buffCount )
{
ringBuffer_Poke(&delayBuffer, temp0.u8[1]);
ringBuffer_Poke(&delayBuffer, temp0.u8[0]);
}
// else drop the space delay sample (probably because the delay has been reduced).
////////////// Finally, set the output volume //////////////////
// multiply our wave by the volume value
MultiSU16X16toH16Round(temp2, temp1, synth.master);
// and output wave on both A & B channel, shifted to (+)ve values only because this is what the DAC needs.
*ch_A = *ch_B = temp2 + 0x8000;
This generates the required output waveforms that make the Goldilocks Analogue Synthesiser work.
The second order Biquad IIR filter code has been implemented in a general way, enabling multiple filters to be applied to the sample train. Set up for Low Pass, Band Pass, and for High Pass have been implemented. The coefficients and state variables for each filter are maintained in a structure.
//========================================================
// second order IIR -- "Direct Form I Transposed"
// a(0)*y(n) = b(0)*x(n) + b(1)*x(n-1) + b(2)*x(n-2)
// - a(1)*y(n-1) - a(2)*y(n-2)
// assumes a(0) = IIRSCALEFACTOR = 32 (to increase calculation accuracy).
// http://en.wikipedia.org/wiki/Digital_biquad_filter
// https://www.hackster.io/bruceland/dsp-on-8-bit-microcontroller
// http://www.musicdsp.org/files/Audio-EQ-Cookbook.txt
typedef struct {
uint16_t sample_rate; // sample rate in Hz
uint16_t cutoff; // normalised cutoff frequency, 0-65536. maximum is sample_rate/2
uint16_t peak; // normalised Q factor, 0-65536. maximum is Q_MAXIMUM
int16_t b0,b1,b2,a1,a2; // Coefficients in 8.8 format
int16_t xn_1, xn_2; //IIR state variables
int16_t yn_1, yn_2; //IIR state variables
} filter_t;
void setIIRFilterLPF( filter_t *filter ) // Low Pass Filter Setting
{
if ( !(filter->sample_rate) )
filter->sample_rate = SAMPLE_RATE;
if ( !(filter->cutoff) )
filter->cutoff = UINT16_MAX >> 1; // 1/4 of sample rate = filter->sample_rate>>2
if ( !(filter->peak) )
filter->peak = (uint16_t)(M_SQRT1_2 * UINT16_MAX / Q_MAXIMUM); // 1/sqrt(2) effectively
double frequency = ((double)filter->cutoff * (filter->sample_rate>>)) / UINT16_MAX;
double q = (double)filter->peak * Q_MAXIMUM / UINT16_MAX;
double w0 = (2.0 * M_PI * frequency) / filter->sample_rate;
double sinW0 = sin(w0);
double cosW0 = cos(w0);
double alpha = sinW0 / (q * 2.0f);
double scale = IIRSCALEFACTOR / (1 + alpha); // a0 = 1 + alpha
filter->b0 = \
filter->b2 = float2int( ((1.0 - cosW0) / 2.0) * scale );
filter->b1 = float2int( (1.0 - cosW0) * scale );
filter->a1 = float2int( (-2.0 * cosW0) * scale );
filter->a2 = float2int( (1.0 - alpha) * scale );
}
// interim values in 24.8 format
// returns y(n) in place of x(n)
void IIRFilter( filter_t *filter, int16_t * xn )
{
int32_t yn; // current output
int32_t accum; // temporary accumulator
// sum the 5 terms of the biquad IIR filter
// and update the state variables
// as soon as possible
MultiS16X16to32(yn,filter->xn_2,filter->b2);
filter->xn_2 = filter->xn_1;
MultiS16X16to32(accum,filter->xn_1,filter->b1);
yn += accum;
filter->xn_1 = *xn;
MultiS16X16to32(accum,*xn,filter->b0);
yn += accum;
MultiS16X16to32(accum,filter->yn_2,filter->a2);
yn -= accum;
filter->yn_2 = filter->yn_1;
MultiS16X16to32(accum,filter->yn_1,filter->a1);
yn -= accum;
filter->yn_1 = yn >> (IIRSCALEFACTORSHIFT + 8); // divide by a(0) = 32 & shift to 16.0 bit outcome from 24.8 interim steps
*xn = filter->yn_1; // being 16 bit yn, so that's what we return.
}
Hardware Implementation
The Goldilocks Analogue Prototype 3 is working very well, and it has resolved some of the issues of the second prototype. Using the USART1 MSPIM mode to drive the MCP4822 DAC allows the GUI to use the SPI bus for the Gameduino 2 GUI without conflicts. This is the only way that the rigorous timing for audio output can be maintained, given the heavy SPI usage required to drive the GPU co-processor.
The Atmel AVR ATmega1284p in the Goldilocks Analogue Prototype 3 is running at 24.576MHz. This is significantly above the specification (20MHz at 5V), but remembering that the specification for AVR ATmega devices covers an extended temperature range (that would kill a human) and it is unlikely that the Goldilocks Analogue would be used in extreme temperature situations, I’ve had no problems with this processor frequency to date.
There are two reasons for over-clocking the ATmega1284p. The first is that it is simply not possible to make the required calculations within the time budget available at the maximum specification CPU frequency of 20MHz or even more extreme at the standard Arduino rate of 16MHz.
The second reason is related to the generation of exact audio sampling frequencies. With a CPU clock of 24.576MHz, the 8 bit timer with pre-scaling can generate EXACT audio sample timing at 8kHz, 12kHz, 16kHz, 32kHz, and 48kHz. Using a 16 bit timer, we can also generate very close approximations to 44.1kHz, if required.
The routine to transfer samples does not need to consume precious 16 bit timer resources, which are useful to produce PWM for motor control. Retaining the capability to manage two motors (using the two 16 bit timers) is fairly important outcome.
The interrupt for generating the wave forms does only two things; write the sample values to the DAC, and then calculate the new sample value for the next sample time. The samples are written to the DAC first to ensure that the output is not jittered by the possibility of variable processing time in the audio handler routine. This can happen if (for example) one of the VCO is turned off, removing the sample calculation code from the code execution path.
ISR(TIMER0_COMPA_vect) __attribute__ ((hot, flatten));
ISR(TIMER0_COMPA_vect)
{
// MCP4822 data transfer routine
// move data to the MCP4822 - done first for regularity (reduced jitter).
// &'s are necessary on data_in variables
DAC_out (ch_A_ptr, ch_B_ptr);
// audio processing routine - do whatever processing on input is required - prepare output for next sample.
// Fire the global audio handler, if set.
if (audioHandler!=NULL)
audioHandler(ch_A_ptr, ch_B_ptr);
}
I’m building an advanced Arduino clone based on the AVR ATmega1284p MCU with some special features including a 12 bit DAC MCP4822, headphone amplifier, 2x SPI Memory (SRAM, EEPROM), and a SD Card. There are many real world applications for analogue outputs, but because the Arduino platform doesn’t have integrated DAC capability there are very few published applications for analogue signals. A Walkie Talkie is one example of using digital and analogue together to make a simple but very useful project.
Two Goldilocks Analogue prototypes with XBee radios, and Microphone amplifiers.
The actual Walkie Talkie functionality is really only a few lines of code, but it is built on a foundation of analogue input (sampling), analogue output on the SPI bus to the MCP4822 DAC, sample timing routines, and the XBee digital radio platform. Let’s start from the top and then dig down through the layers.
XBee Radio
I am using XBee Pro S2B radios, configured to communicate point to point. For the XBee Pro there needs to be one radio configured as the Coordinator, and the other as a Router. There are configuration guides on the Internet.
I have configured the radios to wait the maximum inter-character time before sending a packet, which implies that the packets will be set only when full (84 bytes). This maximises the radio throughput. Raw throughput is 250 kbit/s, but the actual user data rate is limited to about 32 kbit/s. This has an impact on the sampling rate and therefore quality of speech that can be transmitted.
Using 10 bit samples companded using A-Law to 8 bit code words, I have found that about 3 kHz sampling generates about as much data as can be transmitted without compression. I’m leaving G.726 compression for another project.
The XBee radios are configured in AT mode, which acts as a transparent serial pipe between the two endpoints. This is the simplest way to connect two devices via digital radio. And it allowed me to do simple testing, using wire, before worrying about whether the radio platform was working or not.
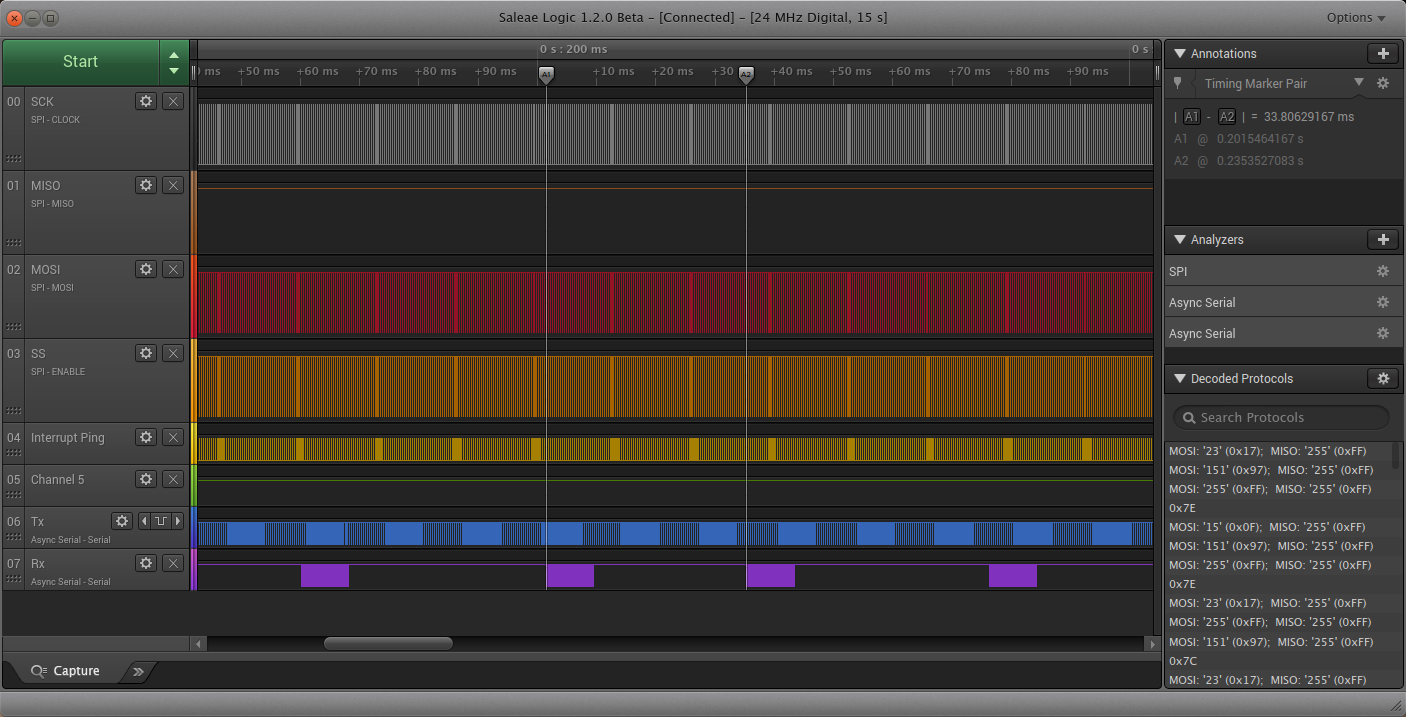
XBee Packet Reception in Purple
Looking at the tracing of a logic analyser, we can see the XBee data packets arriving on the (purple) Rx line of the serial port. The received packet data is stored into a ring buffer, and played out at a constant rate. I have allowed up to 255 bytes in the receive ring buffer, and this will be sufficient because the XBee packet size is 84 bytes.
The samples to be transmitted to the other device are transmitted on the (blue) Tx line, more or less in each sample period even though they are buffered before transmission. The XBee radio buffers these bytes for up to 0xFF inter-symbol periods (configuration), and only transmits a packet to the other endpoint when it has a full packet.
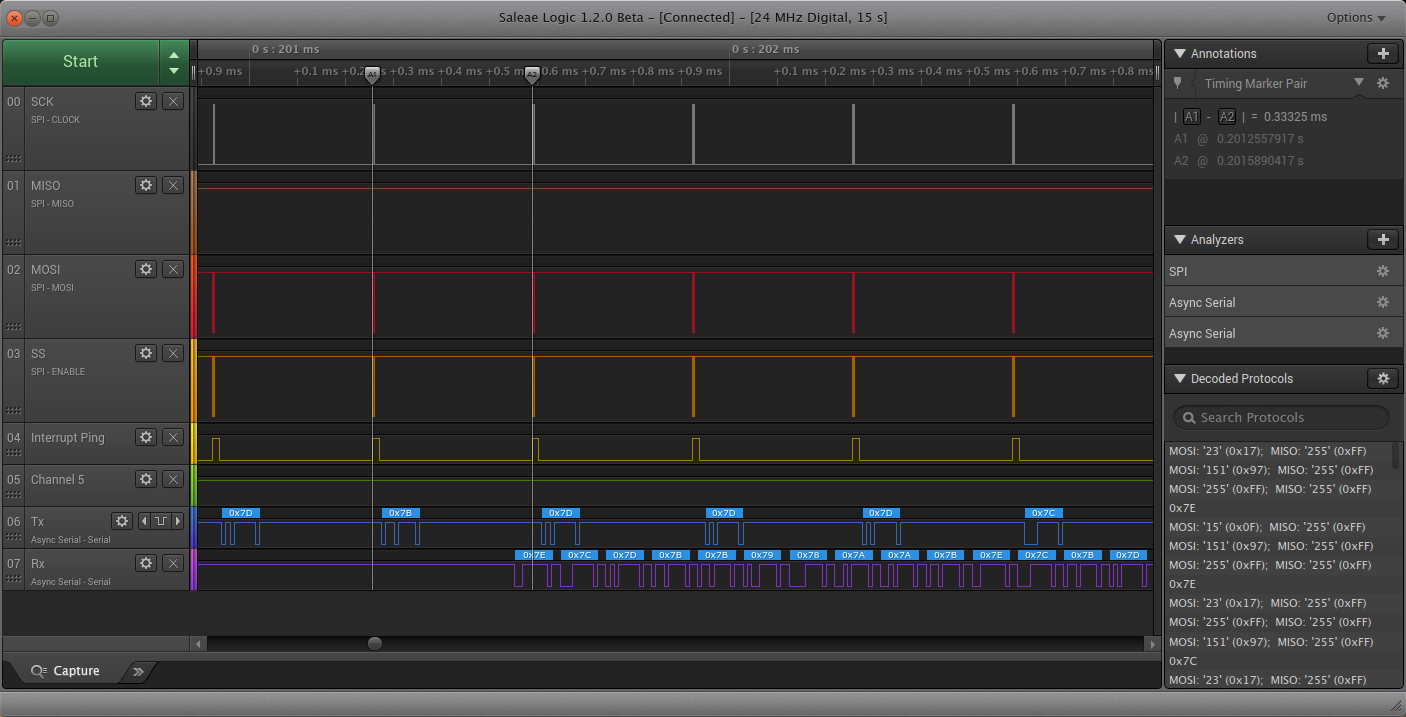
Sampling Rate
Looking at the bit budget for the transmission link, we need to calculate how much data can be transmitted without overloading the XBee radio platform, and causing sample loss. As we are not overtly compressing the voice samples, we have 8 bit samples times 3,000 Hz sampling or 24 kbit/s to transmit. This seems to work pretty well. I have tried 4 kHz sampling, but this is too close to the theoretical maximum, and doesn’t work too effectively.
Sample rate of 3,000 Hz seems to be the optimum.
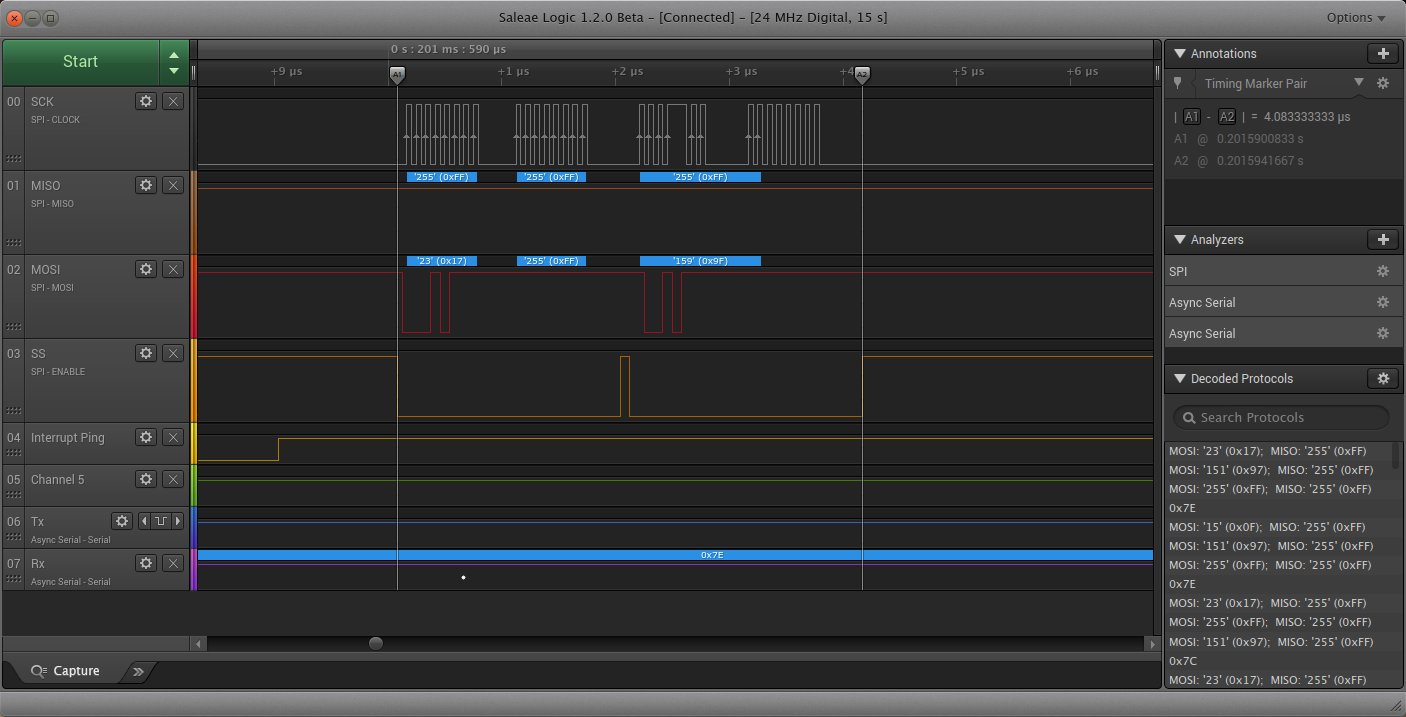
Looking at the logic analyser, we can see the arrival of a packet of bytes commencing with 0x7E and 0x7C on the Rx line. Both the Microphone amplifier and the DAC output are biased around 0x7F(FF), so we can read that the signal levels captured and transmitted here are very low. The sample rate shown is 3,000 Hz.
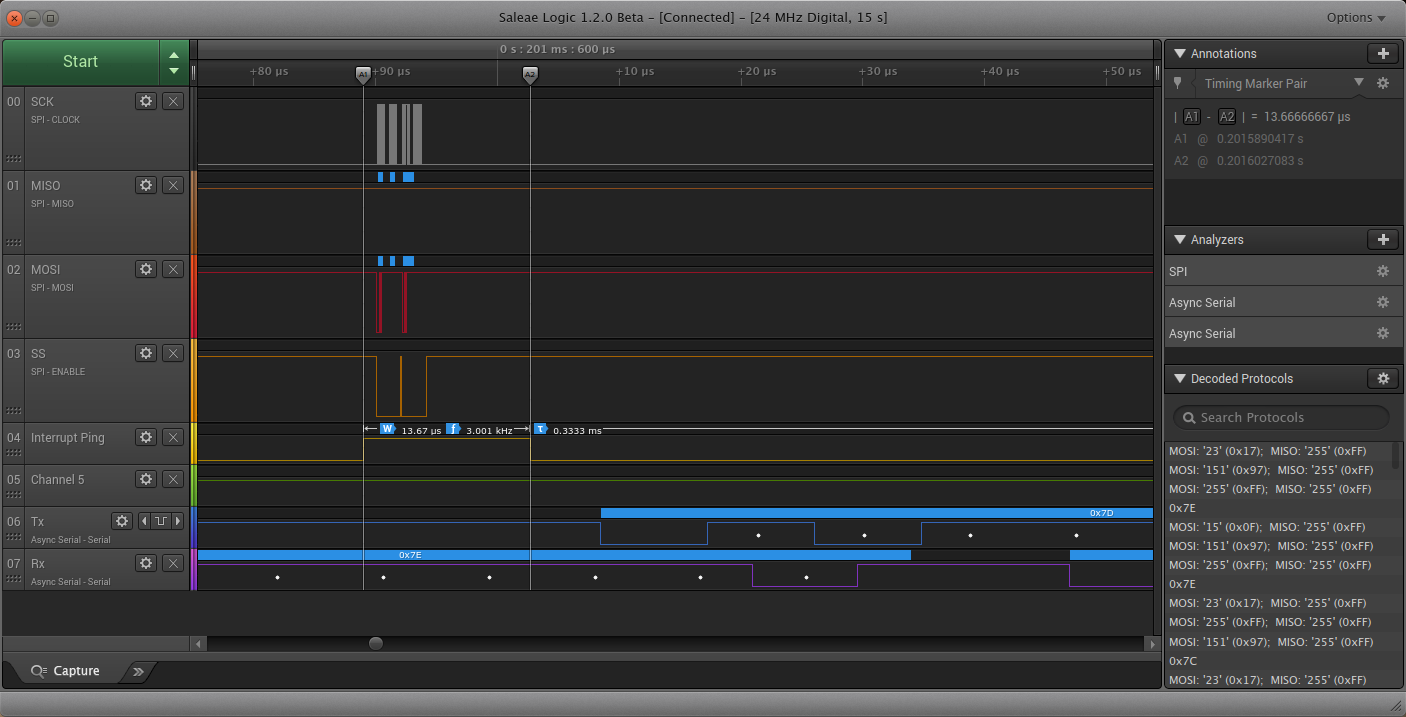
Sample Processing
I have put a “ping” on one output to capture when the sampling interrupt is being processed (yellow). We can see that the amount of time spent in the interrupt processing is very small for this application, relative to the total time available. Possibly some kind of data compression could be implemented.
DAC and sample processing
During the sampling interrupt, there are two major activities, generating an audio output, by placing a sample onto the DAC, and then reading the ADC to capture an audio sample and transmit it to the USART buffer.
This is done by the audioCodec_dsp function, which is called from the code in a timer interrupt.
void audioCodec_dsp( uint16_t * ch_A, uint16_t * ch_B)
{
int16_t xn;
uint8_t cn;
/*----- Audio Rx -----*/
/* Get the next character from the ring buffer. */
if( ringBuffer_IsEmpty( (ringBuffer_t*) &(xSerialPort.xRxedChars) ) )
{
cn = 0x80 ^ 0x55; // put A-Law nulled signal on the output.
}
else if (ringBuffer_GetCount( &(xSerialPort.xRxedChars) ) > (portSERIAL_BUFFER_RX>>1) ) // if the buffer is more than half full.
{
cn = ringBuffer_Pop( (ringBuffer_t*) &(xSerialPort.xRxedChars) ); // pop two samples to catch up, discard first one.
cn = ringBuffer_Pop( (ringBuffer_t*) &(xSerialPort.xRxedChars) );
}
else
{
cn = ringBuffer_Pop( (ringBuffer_t*) &(xSerialPort.xRxedChars) ); // pop a sample
}
alaw_expand1(&cn, &xn); // expand the A-Law compression
*ch_A = *ch_B = (uint16_t)(xn + 0x7fff); // move the signal to positive values, put signal out on A & B channel.
/*----- Audio Tx -----*/
AudioCodec_ADC( &mod7_value.u16 ); // sample is 10bits left justified.
xn = mod7_value.u16 - 0x7fe0; // center the sample to 0 by subtracting 1/2 10bit range.
IIRFilter( &tx_filter, &xn); // filter transmitted sample train
alaw_compress1(&xn, &cn); // compress using A-Law
xSerialPutChar( &xSerialPort, cn); // transmit the sample
}
I am using the AVR 8 bit Timer0 to generate the regular sample intervals, by triggering an interrupt. By using a MCU FCPU frequency which is a binary multiple of the standard audio frequencies, we can generate accurate reproduction sampling rates by using only the 8 bit timer with a clock prescaler of 64. To generate odd audio frequencies, like 44,100 Hz, the 16 bit Timer1 can be used to get sufficient accuracy without requiring a clock prescaler.
The ATmega1284p ADC is set to free-run mode, and is scaled down to 192 kHz. While this is close to the maximum acquisition speed documented for the ATmega ADC, it is still within the specification for 8 bit samples.
ISR(TIMER0_COMPA_vect) __attribute__ ((hot, flatten));
ISR(TIMER0_COMPA_vect)
{
#if defined(DEBUG_PING)
// start mark - check for start of interrupt - for debugging only (yellow trace)
PORTD |= _BV(PORTD7); // Ping IO line.
#endif
// MCP4822 data transfer routine
// move data to the MCP4822 - done first for regularity (reduced jitter).
DAC_out (ch_A_ptr, ch_B_ptr);
// audio processing routine - do whatever processing on input is required - prepare output for next sample.
// Fire the global audio handler which is a call-back function, if set.
if (audioHandler!=NULL)
audioHandler(ch_A_ptr, ch_B_ptr);
#if defined(DEBUG_PING)
// end mark - check for end of interrupt - for debugging only (yellow trace)
PORTD &= ~_BV(PORTD7);
#endif
}
This interrupt takes 14 us to complete, and is very short relative to the 333 us we have for each sample period. This gives us plenty of time to do other processing, such as running a user interface or further audio processing.
SPI Transaction
At the final level of detail, we can see the actual SPI transaction to output the incoming sample to the MCP4822 DAC.
SPI MCP4822 DAC Transaction
As I have built this application on the Goldilocks Analogue Prototype 2 which uses the standard SPI bus, the transaction is normal. My later prototypes are using the Master SPI Mode on USART 1 of the ATmega1284p, which slightly accelerates the SPI transaction through double buffering, and frees the normal SPI bus for simultaneous reading or writing to the SD Card or SPI Memory, for audio streaming. In the Walkie Talkie application there is no need to capture the audio, so there’s no down side to using the older prototypes and the normal SPI bus.
void DAC_out(const uint16_t * ch_A, const uint16_t * ch_B)
{
DAC_command_t write;
if (ch_A != NULL)
{
write.value.u16 = (*ch_A) >> 4;
write.value.u8[1] |= CH_A_OUT;
}
else // ch_A is NULL so we turn off the DAC
{
write.value.u8[1] = CH_A_OFF;
}
SPI_PORT_SS_DAC &= ~SPI_BIT_SS_DAC; // Pull SS low to select the Goldilocks Analogue DAC.
SPDR = write.value.u8[1]; // Begin transmission ch_A.
while ( !(SPSR & _BV(SPIF)) );
SPDR = write.value.u8[0]; // Continue transmission ch_A.
if (ch_B != NULL) // start processing ch_B while we're doing the ch_A transmission
{
write.value.u16 = (*ch_B) >> 4;
write.value.u8[1] |= CH_B_OUT;
}
else // ch_B is NULL so we turn off the DAC
{
write.value.u8[1] = CH_B_OFF;
}
while ( !(SPSR & _BV(SPIF)) ); // check we've finished ch_A.
SPI_PORT_SS_DAC |= SPI_BIT_SS_DAC; // Pull SS high to deselect the Goldilocks Analogue DAC, and latch value into DAC.
SPI_PORT_SS_DAC &= ~SPI_BIT_SS_DAC; // Pull SS low to select the Goldilocks Analogue DAC.
SPDR = write.value.u8[1]; // Begin transmission ch_B.
while ( !(SPSR & _BV(SPIF)) );
SPDR = write.value.u8[0]; // Continue transmission ch_B.
while ( !(SPSR & _BV(SPIF)) ); // check we've finished ch_B.
SPI_PORT_SS_DAC |= SPI_BIT_SS_DAC; // Pull SS high to deselect the Goldilocks Analogue DAC, and latch value into DAC.
}
Wrap Up
Using a few pre-existing tools and a few lines of code, it is possible to quickly build a digitally encrypted walkie talkie, capable of communicating (understandable, but certainly not high quality) voice. And, there ain’t no CB truckers going to be listening in on the family conversations going forward.
This was a test of adding microphone input based on the MAX9814 to the Goldilocks Analogue. I will be revising the Prototype 3 and will add in a microphone amplification circuit to support applications needing audio input, like this walkie talkie example, or voice changers, or vocal control music synthesizers.
I’m also running the ATmega1284p devices at the increased frequency of 24.576 MHz, over the standard rate of 20 MHz. This specific frequency allows very precise reproduction of audio samples from 48 kHz down right down to 4 kHz (or even down to 1,500 Hz). The extra MCU clock cycles per sample period are very welcome when it comes to generating synthesised music, or encoding audio samples.
Code as usual on Github AVRfreeRTOS repository. Also, a call out to Shuyang at SeeedStudio who’s OPL is awesome, and is the source of many components and PCBs.
The AVR ATmega MCU used by the Arduino Uno and its clones and peers (Leonardo, Pro, Fio, LilyPad, etc) and the Arduino Mega have the capability to use their USART (Universal Serial Asynchronous Receiver Transmitter), also known as the Serial Port, as an additional SPI bus interface in SPI Master mode. This fact is noted in the datasheets of the ATmega328p, ATmega32u4, and the ATmega2560 devices at the core of the Arduino platforms, but until recently it hasn’t meant much to me.
Over the past 18 months I’ve been working on an advanced derivative of the Arduino platform, using an ATmega1284p MCU at its core. I consider the ATmega1284p device the “Goldilocks” of the ATmega family, and as such the devices I’ve built have carried that name. Recently I have been working on a platform which has some advanced analogue output capabilities incorporating the MCP4822 dual channel DAC, together with a quality headphone amplifier, and linear OpAmp for producing buffered AC and DC analogue signals. This is all great, but when it comes down to outputting continuous analogue samples to produce audio it is imperative that the sample train is not interrupted or the music simply stops!
The issue is that the standard configuration of the Arduino platform (over)loads the SPI interface with all of the SPI duties. In the case of the Goldilocks and other Arduino style devices I have ended up having the MicroSD card, some SPI EEPROM and SRAM, and the MCP4822 DAC all sharing same SPI bus. This means that the input stream of samples from the MicroSD card are interfering and time-sharing with the output sample stream to the DAC. The MicroSD card has a lot of latency, often taking hundreds of milliseconds to respond to a command, whereas the DAC needs a constant stream of samples with no jitter and no more than 22us between each sample. That is a conflict that is difficult to resolve. Even using large buffers is not a solution, as when streaming audio it is easy to consume MBytes of information; which is orders of magnitude more than can be buffered anywhere on the ATmega platform.
Other solutions using a DAC to generate music have used a “soft SPI” and bit-banging techniques to work around the issue. But this creates a performance limitation as the maximum sample output rate is strongly limited by the rate at which the soft SPI port can be bit-banged. There has to be a better way.
USART in SPI mode
The better way to attach SPI Slave devices to the ATmega platform is referenced in this overlooked datasheet heading: “USART in SPI mode”. Using the USART in “Master SPI Mode” (MSPIM) is may be limiting if you need to use the sole serial port to interact with the Arduino (ATmega328p), but once the program is loaded (in the case of using a bootloader) there is often no further need to use the serial port. But for debugging if there is only one USART then obviously it becomes uncomfortable to build a system based on the sole USART in SPI mode.
However in the case of the Goldilocks ATmega1284p MCU with two USARTs, the Arduino Leonardo with both USB serial and USART, and the Arduino Mega ATmega2560 MCU with four USARTs, there should be nothing to stop us converting their use to MSPIM buses according to need.
Excuse me for being effusive about this MSPIM capability in the AVR ATmega. It is not exactly a secret as it is well documented and ages old, but it is a great feature that I’ve simply not previously explored. But now I have explored it, I think it is worthwhile to write about my experience. Also, I think that many others have also overlooked this USART MSPIM capability, because of the dearth of objective review to be found on the ‘net.
Any ATmega datasheet goes into the detailed features and operation of the USART in SPI mode. I’ll go into some of the features in detail and what it means for use in real life.
Full Duplex, Three-wire Synchronous Data Transfer – The MSPIM does not rely on having a Slave Select line on a particular pin, and further it doesn’t rely on having both MOSI and MISO lines active at the same time. This means that it is possible to attach a SPI Slave device that doesn’t use the _SS to begin or end transactions with just two pins, being the XCK pin and the Tx pin. If a _SS is required (as in the MCP4822) then only three wires are required. The fact that the MISO (Rx) pin is optional saves precious pins too.
Master Operation – The MSPIM only works in SPI Master mode, which means that it is only really useful for connecting accessories. But in the Arduino world, that is what we are doing 99% of the time.
Supports all four SPI Modes of Operation (Mode 0, 1, 2, and 3) – yes, it does.
LSB First or MSB First Data Transfer (Configurable Data Order) – yes, it does.
Queued Operation (Double Buffered) – The MSPIM inherits the USART Tx double buffering capability. This is a function not available on the standard SPI interface and is a great thing. For example, to output a 16bit command two writes to the I/O register can follow each other immediately, and the resulting XCK has no delay between each Byte output. To output a stream of bytes the buffer empty flag can be used as a signal to load the next available byte, ensuring that if the next byte can be loaded with 16 instructions then we can generate a constant stream of bytes. In contrast with the standard SPI interface transmission is not buffered and therefore in Master Mode we’re invariably wait-looping before sending the next byte. This wastes cycles in between each byte in recognising completion, and then loading the next byte for transmission.
High Resolution Baud Rate Generator – yes, it is. The MSPIM baud rate can be set to any rate up to half the FCPU clock rate. Whilst there may be little need to run the MSPIM interface at less than the maximum for pure SPI transactions, it is possible to to use this feature, together with double buffered transmission, to generate continuous arbitrary binary bit-streams at almost any rate.
High Speed Operation (fXCKmax = FCPU/2) – The MSPIM runs at exactly the same maximum clock speed as the standard SPI interface, but through the double buffering capability mentioned above the actual byte transmission rate can be significantly greater.
Flexible Interrupt Generation – The MSPIM has all the same interrupts as the USART from which it inherits its capabilities. In particular the differentiation between buffer space available flag / interrupt and transmission complete flag / interrupt capabilities make it possible to develop useful arbitrary byte streaming solutions.
Implementation Notes
As the USART in normal mode and the USART in MSPIM mode are quite similar in operation there is little that needs to be written. The data sheet has a very simple initialisation code example, which in practice is sufficient for getting communications going. I would note that as there is no automatic Slave Select management, the _SS line needs to be manually configured as an output, and then set (high) appropriately until such time as the attached SPI device is to be addressed. Also note that the XCKn (USART synchronous clock output) needs to be set as an output before configuring the USART for MSPIM. And also to note that the transmission complete flag (TXCn) is not automatically cleared by reading (it is only automatically cleared if an Interrupt is processed), and needs to be manually cleared before commencing a transmission (by writing a 1 to the TXCn bit) it you are planning to use it to signal transaction completion in your code. The Transmit and Receive Data Register (UDRn) is also not automatically cleared, and needs to be flushed before use if a receive transaction is to synchronised to the transmitted bytes.
So the implementation of a simple initialisation code fragment looks like this:
SPI_PORT_DIR_SS |= SPI_BIT_SS; // Set SS as output pin.
SPI_PORT_SS |= SPI_BIT_SS; // Pull SS high to deselect the SPI device.
UBRR1 = 0x0000;
DDRD |= _BV(PD4); // Setting the XCK1 port pin as output, enables USART SPI master mode (this pin for ATmega1284p)
UCSR1C = _BV(UMSEL11) | _BV(UMSEL10) | _BV(UCSZ10) | _BV(UCPOL1);
// Set USART SPI mode of operation and SPI data mode 1,1. UCPHA1 = UCSZ10
UCSR1B = _BV(TXEN1); // Enable transmitter. Enable the Tx (also disable the Rx, and the rest of the interrupt enable bits set to 0 too).
// Set baud rate. IMPORTANT: The Baud Rate must be set after the Transmitter is enabled.
UBRR1 = 0x0000; // Where maximum speed of FCPU/2 = 0x0000
And a fragment of the code to transmit a 16 bit value looks like this. Note with this example there is no need to wait for the UDREn flag to be set between bytes, as we are only writing two bytes into the double transmit buffer. This means that the 16 clocks are generated on XCKn with no gap in delivery.
UCSR1A = _BV(TXC1); // Clear the Transmit complete flag, all other bits should be written 0.
SPI_PORT_SS &= ~_BV(SPI_BIT_SS); // Pull SS low to select the SPI device.
UDR1 = write.value.u8[1]; // Begin transmission of first byte.
UDR1 = write.value.u8[0]; // Continue transmission with second byte.
while ( !(UCSR1A & _BV(TXC1)) ); // Check we've finished, by waiting for Transmit complete flag.
SPI_PORT_SS |= _BV(SPI_BIT_SS); // Pull SS high to deselect the SPI device.
Results
Looking at the output generated by the two different SPI interfaces on the AVR ATmega, it is easy to see the features in action. In the first image we can see that the two bytes of the 16 bit information for the DAC are separated, as loading the next byte to be transmitted requires clock cycles AFTER the transmission completed SPIF flag has been raised.
DAC control using SPI bus.
In the case of the MSPIM output, we can’t recognise where the two bytes are separated, and the end of the transaction is triggered by the Transaction complete flag. This example shows that the MSPIM can be actually faster than the standard SPI interface, even though the maximum clock speed in both cases is FCPU/2.
I am now convinced to use the USART MSPIM capability for the Goldilocks Analogue, and I think that it is time to write some generalised MSPIM interface routines to go into my AVRfreeRTOS Sourceforge repository to make it easy to use this extremely powerful capability.
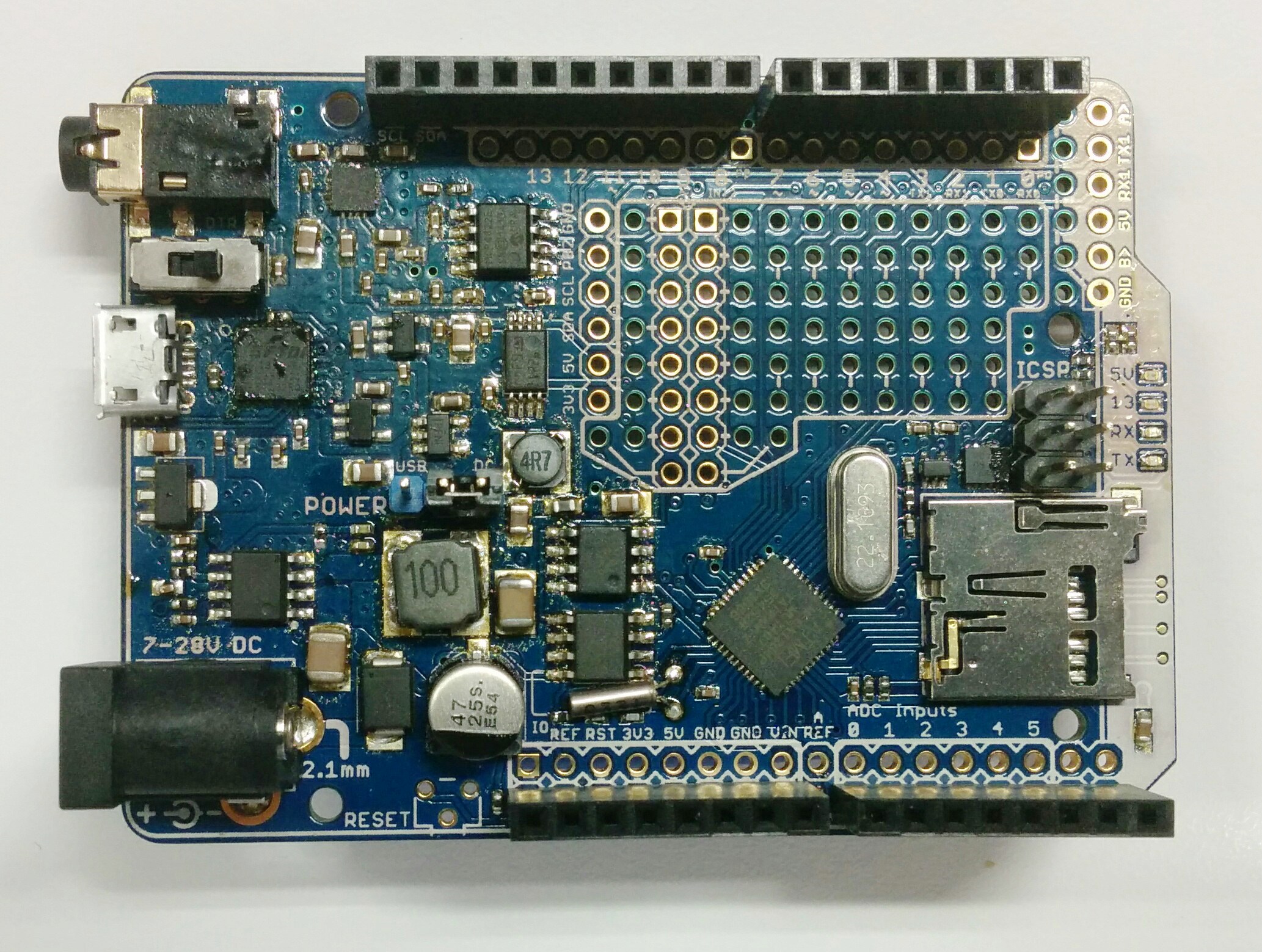
Following my initial design article, and the follow up design article, I’ve put quite a lot of thought into how I can make this Goldilocks Analogue device best achieve my stated goals. Pictured is the new 3rd Goldilocks Analogue Prototype
The finished prototype boards are now in my hands, and testing of the PCB configuration the new SPI EEPROM and SRAM capabilities, together with MSPIM interface for the DAC begins. These two features contribute to making the Goldilocks Analogue great analogue synthesiser platform.
This is the working design document. It will grow as I get more stuff done, and notes added here. I’ve pretty much finished the paper design now, and will let it settle for a few weeks over the 2014 holiday season. It is sometimes good to do things again, with a few weeks perspective from the original decisions.
Goldilocks Analogue – Prototype 2
Major Revision in Strategy
Over the past months I’ve been spending time writing code to go along with the latest revision of the Goldilocks Analogue. I have successfully implemented a version of the NASA EEFS simple flash file system, to use to buffer data either for acquisition or for analogue playback, and I’ve been working on streaming functions to get data off the SD card and off the EEFS flash file system. The outcome is that it is not possible to do everything with just one SPI bus, and keep generality when needed. The SD card is just too slow, and can’t be easily interrupted. The FRAM/SRAM/EEPROM doesn’t have enough storage to effectively stream GigaBytes of data, as a uSD card can achieve.
So, what to do? Adafruit uses a software bit-banged SPI outcome to drive their MCP4921 and doesn’t get close to the maximum speed I want to achieve. Fortunately, with the ATmega1284p there is a simple answer at hand. I have decided to move the MCP4822 off the standard SPI pins, and connect it to the USART1 TX and XCK pins, using the USART in its Master SPI mode.
This is a major revision in strategy. Previously I have been very adverse to putting anything on the standards Arduino pins, preferring to keep all of the Goldilocks extra features off the Arduino footprint. However, the outcome is well worth using the USART1 to drive the MCP4822, and nothing is compromised.
USART MSPI mode is available on any ATmega device. On the UNO platform, using the ATmega328p, there is only one USART and so of course it is reserved for serial communications. The Goldilocks ATmega1284p has two USART interfaces, and usually the second one (USART 1) goes unused. Therefore connecting its XCK and TX pins to the MCP4822 is the simplest and best outcome to achieve high throughput and regularity SPI output on a non-shared SPI interface. And, as the MCP4822 DAC has high impedence (~10kOhm) inputs, having the DAC sharing the pins won’t affect normal pin usage to any extent.
And, there’s more win. The USART MSPI has double buffering for the transmit function. This means that we can actually achieve a higher throughput using the USART MSPI than we can using the standard SPI bus! These logic traces demonstrate that the my best implementation of the SPI interface requires 4.58us to transmit a “frame” of information, consisting of two 12 bit samples. Using the USART MSPI interface we can achieve 4.25us per frame.
DAC control using SPI bus.
DAC control using USART MSPI bus.
Either way, achieving 44.1kHz stereo output is not an issue. This trace shows the time spent in the DAC-out interrupt for a simple function, with the samples being played out at 44.1kHz.
44.1kHz samples using USART MSPI output.
Guessing that this would be a great outcome, I ordered new PCBs from Seeed which implement the new pin assignments for the MCP4822. They will be here shortly.
My Revision Plans
Revert the uSD card 3V SPI bus drivers back to the quad and single buffers. The TXB/TXS story remains unresolved, and I can’t be bothered to work out why, when a simple answer is at hand. – DONE
Connect the uSD _CARD_DETECT to PC2 which has no other function except JTAG. – DONE
Remove the FTDI 6 pin for USART0. Or, better to move it to connect to USART1, so that USART1 can be addressed by an external FTDI device. Move it to the end of the board, so it doesn’t block Shield usage. Note the RTS/CTS Reset is not connected because this is replaced by a DAC A/B channel. – DONE
Remove the Analogue outputs from centre of board. Move them to the end of the board and integrate them into the FTDI USART1 socket on the RTS and CTS pin positions (obviously not on Tx or Rx pins, or on Vcc or GND either). – DONE
Connect the MCP4822 _LDAC pin to enable sychronisation of the A and B channels. Connect to PC3 which has no other function except JTAG. Remember the _LDAC is pulled to GND by default. – DONE
Have another look at the output filtering on the DAC, perhaps it could be a little stronger than the prototype with the corner at 23kHz. Single pole R1=68Ω C1=100nF. – DONE
This 2nd order filter is still linear, but filters significantly more (6dB rather than 3dB per decade) than the single pole version on the prototype.
Extend the prototyping area by three columns. – DONE
Add a pin-out to allow the DS3231 RasPi module (battery or super capacitor) from Seeed Studio to be easily attached. Unfortunately, the devices I have don’t implement an _INT/SQW output, so alarms and wake on alarm won’t be possible. – DONE
Push the JTAG pads to the back of the board, without forgetting to flip the pin layout around. – DONE
Add SRAM or FRAM SPI storage. FRAM is non volatile storage, that has no delay. With a reasonable amount of storage we can use it to provide short audio samples, and get them back relatively easily, without file system and uSD card overheads. But FRAM is pretty expensive, and SRAM chips with same pin-out are available for much cheaper, that might fulfil the job of buffering or capturing samples.
MB85RS64V FRAM is the only reasonable device available for 5V supply. And it is a reasonable price of $1.80 per unit. But it is much too small to use as an analogue sample store. Need to use the 128kB MB85RS1MT FRAM version, but this required being driven from Vcc 3V3. At 8kHz sampling, 128kB gives us 16 seconds of sound, which is quite a lot. It costs around $6 which seems to be the sweet spot in pricing now. Will have to add another 3V3 to 5V MISO buffer. Use PC4 as the MB85RS1MT SPI _SS line.
Alternatively, just make the pinout for SPI 5V and implement SRAM using the Microchip 23LC1024 device, which is $2.50 each. We can choose FRAM or SRAM at assembly. Or even both, as there is a spare _SS available. So let’s do two devices at Vcc 5V supply.
Put 10kOhm pull-up resistors on all of these _SS lines, _CARD_DETECT and _HOLD. – DONE
Add 10kOhm pull-down resistors on _LDAC allowing active _LDAC control but not requiring it. – DONE
Convert the 3.3V regulator to AP1117 type in SOT89-3 package. No space for SOT223. Upgrades the 3.3V supply from 150mA to 1000mA. Heat spread on Layer 2 GND and on Layer 15. – DONE
Initial Board Layout
I’ve finished the schematic and the board layout, and now I just have the detailed work of checking all the things, again, and again. I’ve come back to this after letting it stew for a few days with the thought of changing just one component. But, as usual have made a host of minor adjustments that should make it better. These include further clearance of the ground plane under the analogue components, and untangling and straightening signals and vias where possible.
The board is now pretty tightly packed. But, there is still a large number of options for prototyping on the board, or to exit the board with 8-pin headers. Each of Port A, Port B and Port D can be taken off board with one header each. Alternatively, a 2×8 connector can be attached, with the pins assigned and connected as desired.
The DAC A (L) and DAC B (R) channels are integrated into the far right edge of the board, along with TX1 and RX1 pins in the form of a FTDI 6 pin interface (including 5V and GND).
The first 5 pins of Raspberry Pi IO are replicated, to allow DS3231 RTC modules (designed for RaspPi) to be connected. For permanent mounting, the module can be flipped on its back to show the battery, and be mounted over the DAC which keeps the prototyping area clear.
I have been able to fit 2x SPI SRAM (or FRAM or NVRAM or EEPROM) on the board, using the spare JTAG IO pins. It is very tight, but having the option to fit up to an extra 2Mbit of SRAM will be quite useful for buffering and storing large amounts of data (audio, or samples).
15th April
The finished boards are now in my hands, and testing of the new SPI EEPROM and SRAM capabilities, together with MSPIM interface for the DAC begins.
Goldilocks Analogue – Prototype 3
Of course, new features are coming to mind. I’ll be putting them into the fourth prototype, which should come soon.
9th March
The blue PCB are back. Everything looks in order. The board is almost identical to the previous one. Just the change to the SPI attachment of the MCP4822 DAC to use the second ATmega1284p USART in MSPI mode.
The boards are now being built, and should be finished by the end of March. Looking forward to testing. I’ve requested that the boards be build with 2Mbit EEPROM and 1Mbit EEPROM combined with 1Mbit SRAM options. I don’t think having FRAM will be useful as the storage capability will be too small and too expensive. The EEPROM option will allow up to 16 seconds of high quality audio samples to be stored (without using an SD card). The SRAM option will allow samples of audio to be stored, and then used to play back, but given quality will only be 8 or 10 bits because of the inbuilt ADC capability, up to about 16 seconds can again be recorded.
Goldilocks Analogue – 2x SPI Memory Devices
16th February
Major revision. Moved the DAC control to use the USART1 MSPI function. It will be connected to Arduino Pin 4 XCK1 and Pin 3 TX1. This will ensure that we can stream data from the uSD card or the FRAM/SRAM/EEPROM on the main SPI bus to the DAC on the USARTt1 MSPI bus with no contention issues.
PCB with the revised connections is on its way.
21st January
The boards are back. Everything looks in order. The concept of using the keep-out layer to write in silkscreen works as hoped, so the labels on the edge are legible.
Time to get to ordering the new components, and building.
Goldilocks Analogue – Prototype 3
31st December
Cleaned up the board to allow more labels to be applied, trying to make it self-documenting. Packed the analogue section a bit tighter, and improved the power routing.
21st December
Cleaned up many traces and cleared the Layer 2 GND plane even more. Discovered the DS3231 modules don’t implement the _INT/SQW function, but leaving the connection to PB2 (INT2) on the pin-out for the future.
16th December
Top Layer
Labels for the DAC A and DAC B and FTDI interface have been put into the keep-out layer in the silk screen on the edge. They will appear when the silk is printed.
Added Test Points for the 3.3V SPI signals, which are the only signals that can’t be tested off a pin-out somewhere.
31st December
Added labels for the I2C (Raspberry Pi IO1 through IO5) pin out, by moving the analogue section left.
21st December
16th December
Layer 2 – GND
The GND plane remains whole under the DAC and Amplifiers.
31st December
Moving the analogue section to the left and compressing it moves components more over the solid ground plane.
21st December
Improved the ground plane by moving traces out from under components, and re-routing AVCC line.
16th December
Layer 15 – 5V (and 3.3V)
The 5V layer, with the 3.3V and AVCC 5V supplies too.
31st December
Resolved the S-bend power to the I2C 5V pin out, and removed some dead traces.
21st December
Kept the 5V AVCC line on this layer which makes it longer, but avoids using vias. Tidied up some other power routing.
16th December
Bottom Layer
All the pin-outs are defined on the bottom. Unfortunately, there is no space on the top layer.
The JTAG is now pushed to the back of the board. This will make using the JTAG more difficult, but at least it will not interfere with shields, should the solution require testing when in a system.
9th March 2015
The back side is clean, and all of the labels are unchanged.
Goldilocks Analogue – Prototype 3
21st January 2015
The back side is clean, and all of the labelling will ensure that the board is self documenting. I was unsure whether putting text in the keep-out layer would work, but it seems to work very well. That’s a win.
Goldilocks Analogue – Prototype 3
31st December
Added labels for the “FTDI like” pin out, combined with the DAC outputs, to improve self documentation.
21st December
Added more accurate descriptions, and tidied some routing.
16th December
Pin Mapping
This the map of the ATmega1284p pins to the Arduino physical platform, and their usage on the Goldilocks Analogue
Arduino
UNO R3
328p Feature
328p Pin
1284p Pin
1284p Feature
Comment
Analog 0
PC0
PA0
Analog 1
PC1
PA1
Analog 2
PC2
PA2
Analog 3
PC3
PA3
Analog 4
SDA
PC4
PA4
PC1 I2C -> Bridge Pads
Analog 5
SCL
PC5
PA5
PC0 I2C -> Bridge Pads
Reset
Reset
PC6
RESET
Separate Pin
Digital 0
RX
PD0
PDO
RX0
Digital 1
TX
PD1
PD1
TX0
Digital 2
INT0
PD2
PD2
INT0 / RX1
USART1
Digital 3
INT1 / PWM2
PD3
PD3
INT1 / TX1
USART1
-> MCP4822 MOSI
Digital 4
PD4
PD4
PWM1 / XCK1
16bit PWM
-> MCP4822 SCK
Digital 5
PWM0
PD5
PD5
PWM1
16bit PWM
Digital 6
PWM0
PD6
PD6
PWM2
Digital 7
PD7
PD7
PWM2
Digital 8
PB0
PB2
INT2
<- _INT/SQW
Digital 9
PWM1
PB1
PB3
PWM0
Digital 10
_SS / PWM1
PB2
PB4
_SS / PWM0
SPI
Digital 11
MOSI / PWM2
PB3
PB5
MOSI
SPI
Digital 12
MISO
PB4
PB6
MISO
SPI
Digital 13
SCK
PB5
PB7
SCK
SPI
(Digital 14)
PB0
T0
-> SDCard SPI _SS 3V3
(Digital 15)
PB1
T1
-> MCP4822 SPI _SS
SCL
PC0
SCL
I2C – Separate
SDA
PC1
SDA
I2C – Separate
PC2
TCK JTAG
<- _CARD_DETECT
for uSD Card
PC3
TMS JTAG
-> MCP4822 _LDAC
PC4
TDO JTAG
-> RAM SPI _SS_RAM0
PC5
TDI JTAG
-> RAM SPI _SS_RAM1
PC6
TOSC1
<- 32768Hz Crystal
PC7
TOSC2
-> 32768Hz Crystal
XTAL1
PB6
XTAL2
PB7
(Analog 6)
PA6
-> Pad / Hole
(Analog 7)
PA7
-> Pad / Hole
Discussion on RTC
At the end of the day, the DS3232 / DS3231 device is around $8 best case to me. But modules are available complete with super capacitors from Seeed for around $6. There’s no win here. Stick to the crystal and existing solution, but make it easier to use the Seeed RasPi solution.
Digikey has the DS3231 at $8 per piece. This is pretty expensive, for what it delivers. And there are solutions available with super capacitor backing for under $6 from Seeed.
Design in the DS3232 on the TOSC1 input for the TCXO 32kHz clock and PC5 input for the INT/SQW line. Supply from 3V3 Vcc. Read that the I2C lines can run to 5V5 without issue. INT/SQW outputs are open drain and the INT/SQW can be disabled (high impedance). Let the ATmega1284p switch on its pull-ups for INT/SQW to function. Make sure 20kOhm pull ups on the SCL/SDA lines too.
The DS3232 has 236 Bytes of SRAM, and a push-pull output on TCXO 32kHz line so this is better as an asynchronous clock input.There is an accurate (0.25°C) thermometer function included. It comes in an 20SOIC package which is quite large. Having some SRAM will be very useful for storing configurations that change often (where EEPROM would wear out).
The DS3232M has 236 Bytes of SRAM, and a push-pull output on 32kHz line so this is better as an asynchronous clock input. Having some SRAM will be very useful for storing configurations that change often (where EEPROM would wear out). But, it doesn’t have 5.5V capability on its I2C lines. – Deselect
The DS3231 version comes in an 16SOIC package, which might be better, but it doesn’t have any SRAM, and the TXCO is open drain. – If we need smaller then this is where we go.
The DS3231M MEMS version comes in an 8SOIC package, which might be better, but it is only +-5ppm (rather than +-2ppm). – Don’t need the small package, so go for XTAL version DS3231 in the SOIC16 package.
Digikey has the DS3232 at $8.60 per piece. This is pretty expensive, for what it delivers.
Delete the 32kHz crystal, and capacitors.
Add on a 3V Lithium battery holder. Or a Super Capacitor and a charging diode
Leave the TOSC2 pin floating, as it is not useable when the Timer 2 Asynchronous Clock Input is enabled on TOSC1.
Remove pull-up resistors from RST, as the DS3231 has pull-ups as does the ATmega1284p. The DS3231 has a debounce and 250ms delay function to manage the MCU start up.
Design Input from Angus
IC6 is missing silkscreen marking for pin 1. – DONE
Designator layer needs a cleanup. I had to spend a lot of time in
EAGLE checking which components were which, and what orientations
they had. On such a full board with close-spaced components this is
very important – ideally place each designator between the pads it
refers to, with a consistent orientation relative to the pads. – DONE
Some 0603/0402 components seemed to have wrong pad sizes compared to
BOM output, ie R17 & C13. I placed according to what parts were
supplied. I know this has been revised further but it might be worth
checking BOM output for any remaining anomalies. – CHECKED
If possible move components away from IC bodies, for example C36 is
very close. Even for a pick & place machine I suspect this would be
hard. – DONE
Labels on silkscreens would be very helpful. For instance the power
selection & DTR jumpers, other pin breakouts. For Freetronics boards
we aim to have all of these connections self-documenting, ie each
option labelled somehow. This can be difficult but part of the
appeal of a development board is being able to easily make
customisations without requiring an external reference. – DONE
It’d be great if you could find a way to better convey the offset
pin numbering for pins 8-13. – NO BETTER ANSWER
The MCU 1284p solder stencil paste layer has too large of an
aperture for the thermal pad. If you look at the paste layer of IC1
and compare to IC2 then you’ll see what I mean. The aperture needs
to be cut down in this way or the central pad gets too much paste
and “floats” up, leading to the outer connections not forming
correctly. – OK Can’t change Library
Suggest adding test points for likely problem connections. ie
analogue section power rails, 3.3V SPI connections, raw DAC
outputs. These can just be bare SMD pads on top or bottom of
board. Label with a designator (at least) or a descriptive label if
possible. For an example of what I mean, the OpenVizsla boards have
a really nice set of 4 power test points near the bottom of the
board. – DONE Power is easy off pins. Added 3.3V SPI test points. Other pins all have pin-outs.
Keep the JTAG header, but also distribute the pins to the 2nd Non-Arduino shield pins. – Going to push the JTAG to the back of the board. It will be inconvenient to use, but won’t block the use of Shields when it is actually being used so this is better. This also frees more space for a RTC and battery option. – DONE
Add a RTC option. – Using the 32kHz crystal on Timer 2 the RTC is working fine. Battery and power options can be off board, and as comprehensive and accurate as needed. – DONE
Other RTC options include using the DS3231, which would be more accurate than a 32kHz crystal, and includes an integrated RST debounce timer. Can use the 32kHz output to feed the ATmega1284p Timer 2 and therefore have both devices locked to the same clock. Chronodot as an example for using this RTC. – DONE
Both devices output excellent looking 43.1Hz sine waves, at 44.1kHz reconstruction rate, from the previous 16 bit 1024 sample Sine Wave.
The Goldilocks Analogue produces 0V to 4.096V 1:1 buffered signals from its DC outputs, and an AC amplified headphone output in parallel. The Audio Codec Shield produces 0V to +3V line level signals into 10kOhm, together with an amplified headphone signal.
OML Audio Codec Shield 43.1Hz Sine wave, one channel inverted.
Open Media Labs – Audio Codec Shield
The Audio Codec Shield uses a very capable Wolfson Audio WM8731 device to generate its output. The WM8731 has stereo 24-bit multi-bit sigma delta ADCs and DACs complete with oversampling digital interpolation and decimation filters. Digital audio input word lengths from 16-32 bits and sampling rates from 8kHz to 96kHz are supported. The WM8731 has stereo audio outputs which are buffered for driving headphones from a programmable volume control and line level outputs are also provided complete with anti-thump mute and power up/down circuitry.
Nominally, it is unfair to compare the MCP4822 12 bit DAC against the 24 bit 96kHz WM8731 DAC, but let us see how this looks, when both are driven with 44.1kHz 16 bit inputs. But, based on pricing information from Digikey, they are available at around the same price range, so this has to be a reasonable test.
Head to Head
Testing was done using a 16 bit 1024 sample Sine Wave file. Outputs were generated by a timer triggered to interrupt every 22.7us (44.1kHz), and produce a new output level. Testing should show only a main signal at 43.1Hz, and the reproduction frequency of 44.1kHz. The Goldilocks Analogue discards the lower 4 bits of the samples and only outputs the 12 most significant bits. The WM8731 could produce 24 bit audio from its DAC, but in this test it will be run at 16 bits only.
OML Audio Codec Shield & Goldilocks Analogue with Red Pitaya
All outputs generated by a 1024 sample 16 bit Sine wave, generated with a 44.1kHz reconstruction sample rate, triggered by an interrupt timer.
The OML Audio Codec Shield produces very nice Sine waves.
OML Audio Codec Shield 43.1Hz Sine wave, one channel inverted.
The top of the wave form
and the bottom of the waveform. Show some high frequency noise. This could be removed by the on-board digital filters on the WM8731, but in this testing situation the have not been turned on.
Looking at the spectra generated by both implementations up to 953Hz it is possible to see harmonics from the Sine Wave, and other low frequency noise.
Goldilocks Analogue – 43.1Hz Sine Wave – 953Hz Spectrum
The Audio Codec Shield has a significant noise present at 50Hz, which may be caused by noise leakage through the PC USB power supply not being completely filtered before the supply is provided to the WM8731. Other noise rises up to 80dB, and is present right across the spectrum.
Now that the new prototype for the Goldilocks Analogue is completed, it is time to test it to see how successful the design was. And interestingly, in the time that I’ve been designing the Goldilocks Analogue, Stanford University in collaboration with Texas Instruments have produced their own Analog Shield.
So this test will compare the Goldilocks Analogue with its dual channel 12bit MCP4822 DAC with the Stanford Analog Shield quad channel 16bit DAC8564 DAC. In a later test sequence, using the same test tone, I compare the Goldilocks Analogue with the Open Music Labs Audio Codec Shield using a Wolfson Micro WM8731 24 bit Codec with ADC, DAC, and signal processing capabilities.
Summary (TL;DR)
The test platform is essentially the same ATmega1284p device, clocked at 22.1184MHz. For the Goldilocks Analogue it is integrated on to the main board. For the Analog Shield I used a Goldilocks device as provided in the Pozible project.
You don’t need a lot of space to have great tools. I’m using a Red Pitaya device, configured as an oscilloscope and as a spectrum analyser, together with a Saleae Logic to capture SPI transactions.
Micro Test bench – Red Pitaya and Saleae Logic
Both Goldilocks Analogue and Analog Shield are comfortably capable of producing reasonable quality stereo signals at 44.1kHz sampling rate. Both devices output beautiful looking 43.1Hz sine waves, at 44.1kHz reconstruction rate, from a 16 bit 1024 sample Sine Wave.
The Goldilocks Analogue produces 0V to 4.096V 1:1 buffered signals from its DC outputs, and an AC amplified headphone output in parallel. The Analog Shield produces -5V to +5V balanced amplified signals from the 0 to 2.5V DAC.
Full Swing 43.1Hz Sine Wave Goldilocks Analogue – Blue 0V to +4.096V Analog Shield – Red -5v to +5V
The Analog Shield shows a lot of harmonics at high frequencies as shown. Comparing the two solutions, the Analog Shield doesn’t do justice to the extra 4 bits (theoretically 98dB SNR 16 bit DAC), over the Goldilocks Analogue (theoretically 74dB SNR 12 bit DAC). The BOM price difference between MCP4822 ($4.60) and DAC8564 ($20) is hard to justify given the performance demonstrated.
I think that using the platform of the AVR ATmega (Arduino) there is little point using a 16 bit DAC. There is too much noise (many mV) in the power supply and around Goldilocks or Arduino Uno or Mega boards to make more than 10 to 12 bits of DAC resolution (or ADC resolution) in any way relevant.
Overlaid 976kHz Spectrum – Analog Shield Red – Shows significant harmonics
Stanford – TI Analog Shield
As part of its microcontroller course, Stanford University required a platform to sample and generate analogue signals. The Standford – TI Analog Shield arose from this need.
The Analog Shield contains a Texas Instrument quad channel ADC and a quad channel DAC, together with a variable voltage supply. I have not tested the ADC.
The DAC capability is based on a Texas Instrument DAC8564 device. This device has many interesting features, including the ability to synchronise loading of updated digital outputs, and to maintain multiple power-down states. The DAC8564 has many great features, and it comes with a price tag to match its capabilities.
Analog Shield – Quad 16bit DAC & Quad 16bit ADC – Stanford University & Texas Instruments
Signals generated by the DAC8564 (from 0v to 2.5V) are biased around 0V and amplified to produce a 10V full swing output. The output exhibits some “cramping” around 0x0000 (-5V) outputs.
Analog Shield – Quad DAC Schematic – -5V to +5V full swing
Head to Head
Testing was done using a 16 bit 1024 sample Sine Wave file. Outputs were generated by a timer triggered to interrupt every 22.7us (44.1kHz), and produce a new output level. Testing should show only a main signal at 43.1Hz, and the reproduction frequency of 44.1kHz. The Goldilocks Analogue discards the lower 4 bits of the samples and only outputs the 12 most significant bits.
Theoretically, the Goldilocks Analogue MCP4822 DAC should be able to achieve 74dB SNR, with its 12 bits of resolution, based on the rule of thumb SINAD = (6.02 x BITS) + 1.76. For the Analog Shield DAC8564 the number is 98db SNR.
Head to Head Testing – Using Red Pitaya and Saleae Logic
All outputs generated by a 1024 sample 16bit Sine wave, generated with a 44.1kHz reconstruction sample rate, triggered by an interrupt timer.
Goldilocks Analogue – 43Hz Sine Wave – Two Channels – One Channel Inverted
Analog Shield – 43Hz Sine Wave – Two Channels – One Channel Inverted
In previous testing on the Goldilocks Analogue prototype I had found that my OpAmp devices were unable to achieve 0V properly. In this new prototype I have produced a stable -1.186V Vss supply for the OpAmp. The signals at 0x000 show that I’ve achieved the required result, with the output being smooth down to the 0x000 level, and up to 0xFFF as well.
Goldilocks Analogue – 0xFFF Output
Goldilocks Analogue – 0x000 Output
The Analog Shield also produces smooth signals, but it does display some compression around 0x0000 levels. Possibly because of some issues with generating the Vss rail for the OpAmps.
Analog Shield – 0xFFFF Output
Analog Shield – 0x0000 Output – Slight Clipping
Looking at the spectra generated by both implementations up to 953Hz it is possible to see harmonics from the Sine Wave, and other low frequency noise.
The spectra are not directly comparable, because the Goldilocks Analogue is producing a 4V full swing, or -4dBm, whilst the Analog Shield is producing a 10V full swing, or 3.7dBm. Distortions in the Analog Shield need to be reduced by 7.7dB to be equivalent to distortion in the Goldilocks Analogue.
The spectrum produced by the Goldilocks Analogue shows most distortion is below -70dB, and that the noise floor lies below -100dB.
Goldilocks Analogue – 43.1Hz Sine Wave – 953Hz Spectrum
The Analog Shield has a significant noise present at 50Hz, which may be caused by noise leakage through the PC USB power supply not being completely filtered before the supply is provided to the DAC8564. Other noise rises above -80dB, and is present right across the spectrum.
Analog Shield – 43.1Hz Sine Wave – 953Hz Spectrum
In the spectra out to 7.6kHz we are looking at the clearly audible range, which is the main use case for the devices.
The Goldilocks Analogue has noise carriers out to around 4.5kHz, but they are all below -80dB. After 4.5kHz the only noise remains below -100dB.
Goldilocks Analogue – 43.1Hz Sine Wave – 7.6kHz Spectrum
The Analog Shield shows noise carriers out to only 2.5kHz, but on one channel these are above -80dB. Otherwise the test shows mainly background noise below -100dB beyond 2.5kHz.
Analog Shield – 43.1Hz Sine Wave – 7.6kHz Spectrum
The spectra out to 61kHz should show a noise carrier generated by the reconstruction frequency of 44.1kHz.
The Goldilocks Analogue shows the spectrum maintains is low noise level below -90dB right out to the end of the audible range, and further out to the reconstruction carrier at 44.1kHz.
Goldilocks Analogue – 43.1Hz Sine Wave – 61kHz Spectrum
Similarly, the Analog Shield is quiet out beyond the audible range. It exhibits a strong noise carrier at the reconstruction frequency. Also, it shows some beat frequencies generated by a small noise carrier at 10kHz, and the reconstruction carrier. These noise carriers might be caused by the TPS61093 boost power supply used to generate the +ve and -ve supplies for the output buffer OpAmps, although it has a characteristic frequency at 1.2MHz, or it might be leakage from some other device.
Analog Shield – 43.1Hz Sine Wave – 61kHz Spectrum – Harmonics around 44.1kHz reconstruction frequency
The final two spectra show the signal out to 976kHz. We’d normally expect to simply see the noise floor, beyond the 44.1kHz reconstruction carrier noise.
The Goldilocks Analogue has a noise carrier at around 210kHz. This could be generated by one or both of the TPS60403 devices used to generate the negative AVss supply. These devices have a typical switching frequency of 250kHz, specified between 150kHz and 300kHz, so this is possible. Aside from the single carrier mentioned, there is no further noise out to 976kHz.
Goldilocks Analogue – 43.1Hz Sine Wave – 976kHz Spectrum
The Analog Shield shows the reconstruction carrier noise at -50dB, and then harmonics of this carrier all the way out to 976kHz. Not sure why these artifacts are appearing. There is a chance that noise derived from these signals is impacting the overall outcome for the DAC8564.
Analog Shield – 43.1Hz Sine Wave – 976kHz Spectrum
Using the Saleae Logic we can capture the SPI transactions generating the analogue result. To maintain the 44.1kHz reconstruction rate a set of samples needs to be transferred every 22.7us.
In the code I’ve used to generate the signal an interrupt timer triggers every 22.7us indicated by the rising edge of “Channel 6”. Once the interrupt has finished processing it lowers the Channel 6 line, indicating that control has returned to the main program. If required the main program has to use the remaining time to generate the required signal. Clearly the faster the SPI transaction to set up the transaction can be completed the more time available for other purposes.
The MCP4822 found in the Goldilocks Analogue has 4 control bits and 12 data bits, which are transferred in 2 8 bit transactions. To set two channels only 4 SPI transactions are required, taking 7.25us.
Goldilocks Analog SPI transaction – Interrupt duration 7.25us
The DAC8564 used in the Analog Shield has 8 control bits and 16 data bits, which are transferred in 3 8 bit transactions, or 24 SPI clock cycles. For two channels this takes 6 SPI transactions and 9.08us.
Both devices leave sufficient time for calculation of simple VCO, or other multiply based, effects in real time with 44.1kHz dual channel. Halving the sample rate to 22.05kHz would be necessary to provide more opportunity to retrieve data from uSD cards or other more complex data sources.
Analog Shield SPI Transaction – Interrupt duration 9.083us
The final reality check in this Head-to-Head comparison is provided by Digikey. I must say that some of the features of the DAC8564 had convinced me to look at migrating the production Goldilocks Analogue to use this new TI DAC. However, seeing that the BOM cost for the TI DAC is approximately 4 times greater than the MCP4822 device soon cooled those thoughts.
Given the cost sensitive nature of the Arduino environment it is not practical to use a device costing nearly US$20 on the Goldilocks Analogue platform, irrespective of its performance.
And, given that the Analog Shield provides no justification in terms of signal quality over the existing Goldilocks Analogue solution there seems to be no technical merit in changing the DAC specification, either.
The Microchip MCP4822 is available from US$4.60 at Digikey.
Digikey MCP4822 Pricing
The Texas Instrument DAC8564 is available from US$18.60 at Digikey.
Digikey DAC8464 Pricing
Design Review
The remaining features and functions of the Goldilocks Analogue have been tested, and resulting from these tests I’m going to make the following redesigns and changes.
Revert to tri-state buffers for uSD I/O logic conversion CMOS 5v to CMOS 3v3 – Bi-directional translators pure fail! I tried both TI TXB and TXS devices and they simply didn’t work as specified.
Remove USART pin-out – unnecessary feature and just takes board space.
Move DAC pin-out to right hand edge of the prototyping space – easier to use if not covered by UNO format shield. As the Goldilocks Analogue is slightly longer than standard Arduino UNO shields, putting the DAC DC output pins outside the shield outline on the right hand end of the board will allow easier access for connections.
Increase prototyping space – fill in space freed by pin-out removals.
Use smaller packages where possible – heading for production.
Increase bypass capacitors on uSD 3V supply – uSD cards consume significant current, potential for instability because of long 3V3 supply
Use a JTAG pin for MCP4822 LDAC – to enable synchronization of the DAC channels.
Following my initial design article, and the testing article, I’ve put quite a lot of thought into how I can make this Goldilocks Analogue device best achieve my stated goals. Pictured is the only Goldilocks Analogue Prototype in existence.
Goldilocks Analogue Prototype – Analogue section front of image.
From the testing it was clear that the MCP4822 DAC fully achieved the goals that I had set out to achieve, but that my design for the analogue buffer stage behind it was really quite bad. Fixing it was going to take some thought.
I have decided to separate the analogue output stage into two sections. An AC section which drives the headphone socket, with a designed for purpose headphone amplifier device, and a DC section using a high current rail to rail OpAmp and a negative 1.18V supply rail to allow the OpAmp to fully reach GND or the equivalent 0x000 digital input.
I also found a better solution for the uSD level translation. There is a device designed for purpose, which I’ve now designed into the Goldilocks Analogue.
DAC – MCP4822
The selected dual DAC uses the SPI bus to write 12 bit values to each of its channels. The increments are either 1mV or 0.5mV giving full scale at DC 4.096V or 2.048V depending which scale factor is being used. The testing showed that the DAC is capable of achieving close to the 72dB of SNR that is its theoretical capability.
So from my point of view the DAC, and the AVcc filtering system employed to provide a clean analogue power rail, have achieved their design goal. Let’s not change anything.
Headphone (AC) Output – TPA6132A2
Driving a headphone socket with a nominal impedance of 32 ohm is a hard job for an OpAmp, and they are not designed specifically for this job. Therefore, I thought it would be best to separate the two outputs into two separate full-time output devices, specialised for their purposes (AC headphones, and DC PID or general pin-out). Both Goldilocks Analogue output options are driven simultaneously, and they will not interfere with each other.
For the AC and headphone output, using a specific single ended “DirectPath” headphone amplifier device enabled me to remove the large output coupling capacitors but still achieve a good low frequency output response.
The TPA6132A2 is capable of driving 25 mW into 16 ohm headphones. Its amplifier architecture operates from a single supply voltage and uses an internal charge pump to generate a negative supply rail for the headphone amplifier. The output voltages are centred around 0 V and are capable of positive and negative voltage swings. This means that the TPA6132A2 doesn’t need output blocking capacitors, and therefore can achieve a very good low-frequency fidelity. Using the 1 uF input capacitors stops any turn-on pop or noise, and achieves a low frequency corner below 10 Hz.
As the DAC outputs a signal with up to 4 V peak to peak, I have set the gain on the TPA6132A2 to -6dB. This should result in the full range of the headphone signal being 1 V peak to peak, with approximately 25 mW being delivered into 32 ohm headphones.
The TPA6132 also has a very high power supply an RF noise rejection ratio. Although I’ve gone to a lot of effort to filter the AVcc power supply, the power supply noise generated was still significant. Having over 90 dB PSRR will help to keep the output quiet.
Analogue (DC) Output – TS922A
I originally selected a highly regarded audiophile OpAmp for use in the Goldilocks Analogue. That device was incapable of operating close to its GND rail, and caused significant distortion in the output signal. Based on that experience, I decided to use a rail-to-rail output OpAmp to provide the DC buffered signal.
Even though rail-to-rail OpAmp devices are sold as full Vcc to Vss outputs, under high current loading they all have significant output droop. The only way to avoid this is to avoid driving the (any) OpAmp close to its supply rails.
The positive rail is ok. The supply voltage is a well regulated 5 V DC, and the maximum voltage required from the OpAmp is 4.096 V which is 0xFFF input to the DAC. It is the Ground Rail, which causes the issue, as the OpAmp will be unable to deliver the analogue equivalent 0x000 under high current situations.
The only way to get an OpAmp to deliver a solid GND potential output, is to supply it with a negative supply voltage Vss. Getting a Vss rail is described below.
The TS922A device is designed for high current rail-to-rail outputs, and is specified to work into 32 ohm headphones, 75 ohm video, and 600 ohm inputs. This DC coupled output can be used to drive PID, Triac or any other application requiring a precise analogue signal up to around 50 kHz.
OpAmp Vss (negative) rail
The TS922A can support over 50 mA per channel output, but at this current its output resistance has dropped its ability to reach both rails to greater than 300 mV. Specifically, it can only reach between 0.3 V and 4.4 V. Therefore to enable the output signal to reach GND potential, we have to generate a Vss with greater than -0.3 V, and capable of supplying in excess of 100 mA (over OpAmp both channels).
I looked at a number of options for charge coupled devices, and decided that the cheapest and best way was to use two paralleled TPS60403 devices to each generate -5 V 60 mA from the 5V power rail. These devices don’t filter their output, but since we are not going to use the -5 V directly, this doesn’t matter.
Following the generation of the -5 V supply, I’ve decided on a TPS72301 variable voltage 200 mA linear regulator, configured to generate its reference voltage -1.186 V, to provide a regulated Vss. Using the internal reference voltage saves a few resistors, and it still generates sufficient negative voltage to enable the OpAmp to easily reach true GND potential.
uSD Card Level Translation – TXS0104
Some further analysis of the voltage translation application revealed that the TXS0104 is designed to exactly suit the purpose of interfacing SPI bus at up to 24 MHz. As a side benefit it is a much smaller package, which recovers prototyping space back to the original Goldilocks benchmark. It is also cheaper than the general purpose OpAmps previously used.
Initially, the prototype used the TXB0104 device, but it was unsuccessful. The 4kOhm output resistance combined with less than optimal uSD card characteristics meant that the design failed. The TXB series cannot drive anything with pull-up or pull-down greater than 50kOhm. The uSD card is specified to have 10kOhm to 100kOhm integrated pull-up resistors, but in practice they all seem to be around 10kOhm. The schematic below will be updated to show TXS shortly.
The PCB Layout
The board layout has been completed, and a PCB ordered to this design.
More detail soon.
Top Signal Layer
GND Signal Layer
5V Signal Layer
Bottom Signal Layer
As of June 2014, I’ve now got all the parts, and the PCB ready for a new prototype. This new version was constructed late July 2014 and is awaiting basic testing.
Version 2 of the prototype, fresh out of the oven.
As of August 2014, I have started testing. So far the analogue design seems to check out, with both the headphone (AC biased) circuitry and the OpAmp (DC biased) circuitry performing as intended. More testing soon, and a new post.
Goldilocks Analogue demonstrating a clean DC biased sign wave (to 0V) .
The spectrum at the output of the TS922A OpAmp is cleaner now than directly at the MCP4822 DAC output of the previous prototype iteration.
The nominal 12 bit DAC capabilities are able to achieve 72dB SNR. Target achieved.