
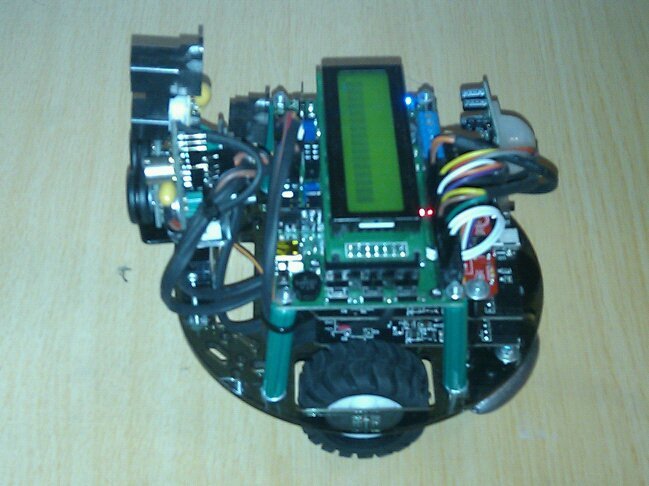
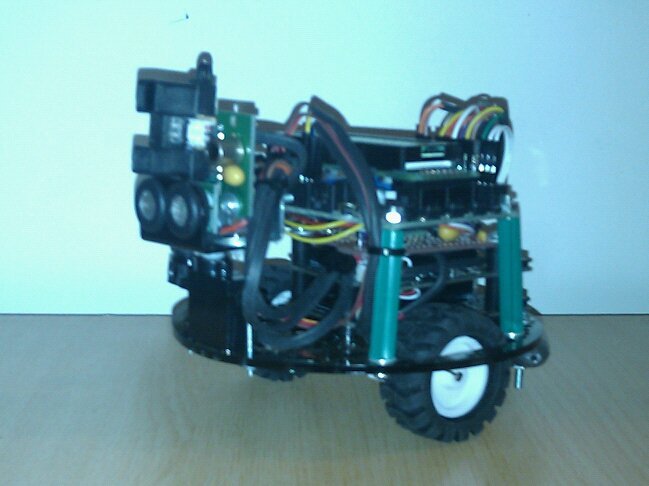
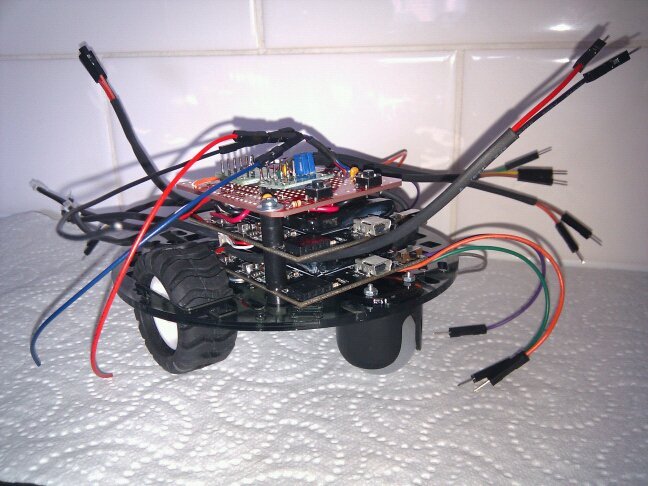
Ok so some time later, I’ve finished building up the hardware.
It is basically a 4 level stack, with the two Li batteries on the bottom, followed by a proto board which carries the acceleration sensors, and distributes power and signal lines.
The top level is the Pololu SVP and its daughter display card (level 5).



What issues are there?
Well electrically none. All the signals are working perfectly, as demonstrated by the Pololu Analogue and Digital code, together with their motor and servo code. All the hardware seems to be functioning perfectly.
But, there are some problems.
The Li battery packs are incapable of providing enough current. I should have done a power budget before building. Everything works pretty well, although there is some voltage droop to 4.5V, until I turn on the neck servo. Then Vcc drops to 3.5V and the DogBot dies.
So the choices are to remove the servo, and program the scanning function using the body, or build a new boost power supply. At this stage I’m tending to think it would be better to just remove the neck servo, and use the chassis for scanning.
Also finished is the freeRTOS port, using Timer3 from the Atmel MegaAT1284, which is not found on other devices of this type. This allows me to have no conflicts with previously written code (using Timer0, Timer1, or Timer2). However, I will still need to go through all libraries to ensure that they don’t cause problems by being interrupted by the RTOS.
So now onto some heavy system design to work out exactly how to implement the mapping and searching functions, and how to drive in a straight line.
